このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


2019年
2018年
2017年
2016年
2015年
2016年1月23日

今日は移動準備日で訓練はありませんでした。
昨日の話が途中でしたので、その続きを。
午後にはロボットアームの訓練がありました。
先日、船外活動とロボットアームの総合訓練をヴァーチャルリアリティー施設を使用して行いましたが、今回もそのシミュレーターを使用しての訓練です。
このシミュレーターを使用して、ロボットアームに特化した訓練を行うのが今回が初めてでした。
通常のシミュレーターとの違いは、その再現度の高さです。
視覚的な表現力が、段違いに良いのです。
恐らくかなり強力なマシンを使用しているのだと思いますが、高精細なISSやHTVが、ロボットアームの操作に応じてヌルヌルと動きます。
飛行機の訓練でも、高性能なシミュレーターを使ったことがありますが、それに近いレベルです。
ロボットアームの操作技量を学ぶことが目的であれば、通常のシミュレーターで十分なのですが、今回の目的は様々なライティングコンディションによる操作感覚の違いを体験することでした。
わかりやすく言うと、太陽の位置やロボットアームのライトのON/OFF、ISS側のライトのON/OFFによって、視認性がどのように影響されるか、どの程度までなら安全にHTVをキャプチャー出来るか、というのを身をもって体験しようというものです。
・・・全然わかりやすくなかったですね。ごめんなさい。
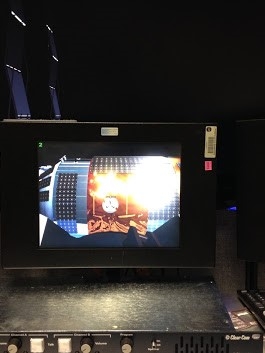
写真を見て頂けるとイメージがお分かり頂けるかと思います。
一枚目の写真では、太陽がHTV表面の太陽電池パネルに反射しています。
二枚目の写真では、太陽が直にロボットアームのカメラに映りこんでしまい、グレア現象を起こしてしまっています。
一枚目の状態では、まだアームで掴むピンの部分が視認できているので、これ以上悪化しなければキャプチャーは可能ですが、二枚目のような状況では、キャプチャーは出来ないと思います。
他にも色々なパターンで練習してみましたが、非常にリアルなシミュレーターで、これまでにはないポイントを学ぶことが出来ました。
この日、最もハードな訓練は一日の最後に待っていました。
体力訓練です。
ISSで実施する運動プログラムを作成するためのデータ取りが始まっているのですが、今回はインターバルトレーニングというものを最初に行いました。
油井さんから聞いてはいましたが、これがきついのなんの・・・
30秒間全力疾走して、30秒間休憩、というのを計8回繰り返します。
「なんだ、たったの4分間走るだけか」と思うなかれ。
自分に出来る全力で走り続けるのは、かなりきついです。
私は運動は苦手で、さらに走ることは大の苦手なので、余計にきつかったのかもしれませんが。
今回使ったトレッドミルは少し特殊なもので、「パッシブ」(受動)と言われる、自分の脚力でベルトを回すタイプのものです。
普通のトレッドミルは、速度をセットするとその速度でベルトが回るようになっていますが、これはそのベルトを自力で回さなければならないのです。
私は今回初めてこのタイプのトレッドミルを使いました。
きついだけあって、効果はかなり高いそうなので皆さんもジムで運動されている方は是非トライしてみてください。
普通のジムに置いてあるのですかね?
日本はとても寒いようですね。
皆さん、どうぞ良い週末を♪
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |