

今週のきぼう
「きぼう」船内実験室運用開始から1650日経過しました
「きぼう」船内実験室での実験や船外実験装置の運用などを継続
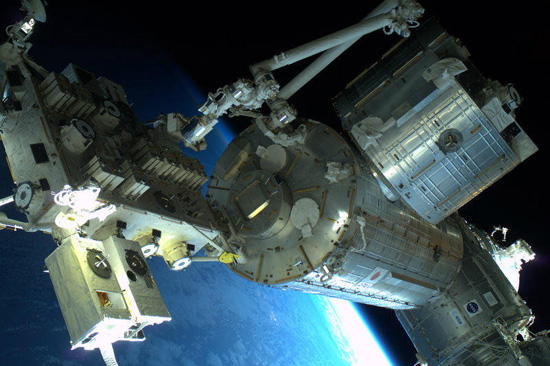
「きぼう」日本実験棟(船外活動中に星出宇宙飛行士により撮影)(出典:JAXA/NASA)

AQH飼育水槽内のメダカの様子(10月26日撮影)(出典:JAXA/NASA)
「きぼう」日本実験棟船内実験室では、多目的実験ラック(Multi-purpose Small Payload Rack: MSPR)の水棲生物実験装置(Aquatic Habitat: AQH)で「メダカにおける微小重力が破骨細胞に与える影響と重力感知機構の解析」(Medaka Osteoclast)実験を引き続き行っています。この実験では、軌道上の微小重力環境でメダカを飼育し、骨代謝を詳細に解析することで、微小重力環境で生じる骨量減少のメカニズムに迫ることを目的としています。
そのほか、溶液結晶化観察装置(Solution Crystallization Observation Facility: SCOF)では、「微小重力における溶液からのタンパク質結晶の成長機構と完全性に関するその場観察による研究」(NanoStep)の3回目の実験を継続しています。この実験では、微小重力環境でタンパク質結晶の成長過程を“その場”(リアルタイム)で観察・測定し、結晶品質と成長メカニズムとの関連を調べることを目的としています。
「きぼう」船外実験プラットフォームでは、ポート共有実験装置(Multi-mission Consolidated Equipment: MCE)に搭載した5種類のミッション機器による実験運用を継続しています。
「宇宙インフレータブル構造の宇宙実証」(SIMPLE)では、インフレータブル構造物(袋状の膜材を気体による内圧によって膨らませて利用する超軽量構造物)を実際の宇宙環境で展開および長期間運用を行い、その実用性を実証するとともに、今後のさまざまな宇宙構造物への適用に向けた基礎データを集めています。
また、「EVA支援ロボットの実証実験」(REX-J)では、宇宙飛行士の船外活動(Extravehicular Activity: EVA)を支援するロボットに不可欠な空間移動機能と作業機能を、伸展式の腕とテザーを内蔵するロボットにより実証しています。
そのほか、地球観測を目的とした「地球超高層大気撮像観測」(IMAP)と「スプライト及び雷放電の高速測光撮像センサ」(GLIMS)、民生品ハイビジョンカメラの曝露環境での宇宙実証を目的とした「船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム」(COTS HDTV-EF)の運用を継続しています。
12月3日夜、「きぼう」船内実験室の多目的実験ラック(Multi-purpose Small Payload Rack: MSPR)内のビデオ圧縮録画装置で不具合が発生し、水棲生物実験装置(Aquatic Habitat: AQH)で行われている「メダカにおける微小重力が破骨細胞に与える影響と重力感知機構の解析」(Medaka Osteoclast)実験のリアルタイムモニタに影響が生じていましたが、軌道上クルーによるケーブルの繋ぎ換えにより、12月4日夜以降、再び2台のカメラによる地上からのモニタが可能となりました。
