(出典:JAXA)
このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


2017年11月 8日
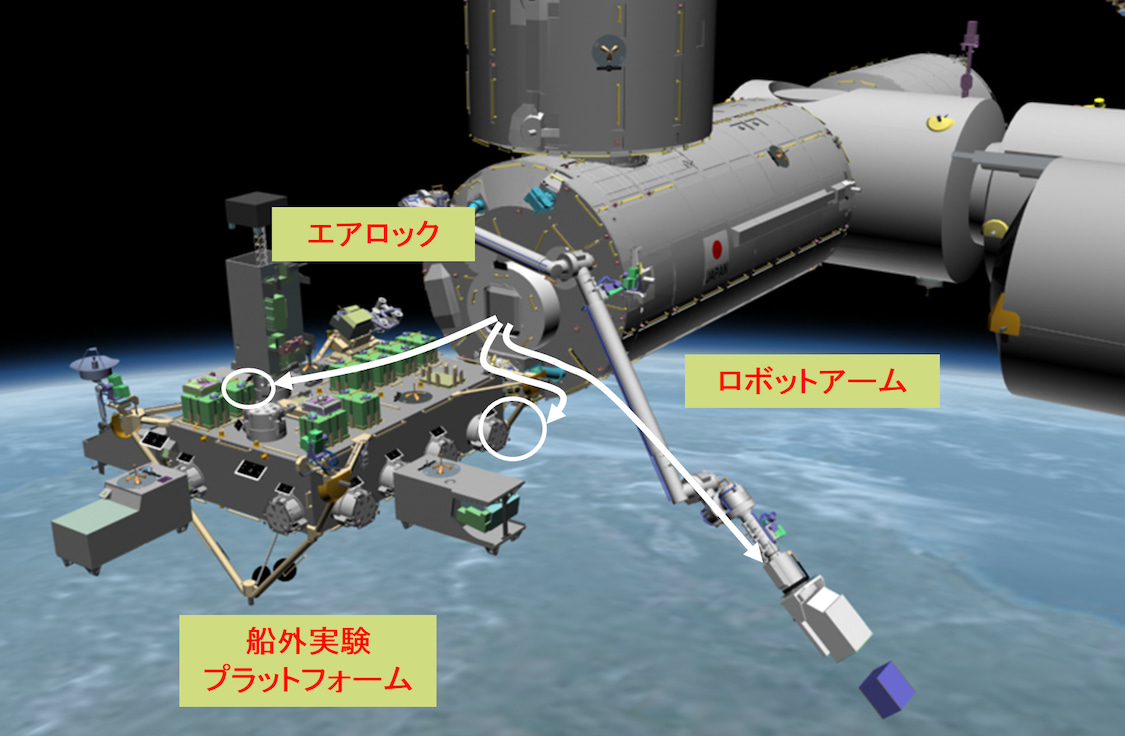
「きぼう」に備え付けられたロボットアームとエアロックは、他国のモジュールにはないユニークなシステムです。
ロボットアームとしては、カナダ宇宙庁の開発した宇宙ステーション・ロボットアーム(別名、カナダアーム2と呼ばれます)があり、宇宙飛行士が船外活動をするときに宇宙ステーションの外に出るためのエアロックもアメリカ・モジュールの一つとして存在しますが、「きぼう」の場合は、ロボットアームとエアロックを組み合わせて運用することで、宇宙ステーションの中から外へ、外から中へ、物品の移送を行うというところに特色があります。
「きぼう」の内部には、ロボットアームの操作台(ワークステーション)が備え付けられていて、アームの関節部分や「きぼう」の外壁に備え付けられたカメラ映像と、窓からの視認により、宇宙飛行士がアームを動かして、船外実験装置の取り付けなどの作業を行うことができます。
・・・というのが、「きぼう」設計時のコンセプトだったのですが、ロボットアームの運用経験を積んでいく中で、「わざわざ宇宙飛行士に操縦を任せなくても、地上の管制官が操作すればいいじゃん」と考えられるようになってきました。
ロボットアームの操縦に不可欠な、軌道上のカメラ映像やシステムに関わる様々なデータは、「きぼう」の制御コンピュータから、宇宙ステーションの制御コンピュータに送られ、そこから通信衛星を介して米国の通信施設にダウンリンクされたあと、国際回線を通して筑波宇宙センターの管制室へと伝達されるので、どうしても数秒の時間差が出てしまいます。
しかし、ロボットアームの動く速度は毎秒数センチと極めてゆっくりであることや、誤って宇宙ステーションの外壁や実験装置にぶつかってしまわないように、アームが動くことができる空間をソフトウェアで制限するようなシステムを使って、地上からの遠隔操作で安全にコントロールすることができるようになっているのです。
実際のところ、KIBOTT(キボットと読みます)というロボティクス専門の管制官は、宇宙飛行士よりも深い専門知識を持っていますし、地上の管制センターで見ることができるロボットアームのシステムに関するデータは、軌道上のワークステーションで確認できるデータよりずっと詳しいので、むしろ地上から遠隔操作を行ったほうが、より安全と言えるかもしれません。
おかげで巨大なロボットアームを動かすという楽しみは少なくなりましたが、これは宇宙飛行士自身にとっても良いことで、宇宙滞在をしている宇宙飛行士にしかできない作業に、より多くの時間を割くことができるようになりました。
例えば、宇宙輸送船「こうのとり」などで運ばれてきた小型衛星が、打上げの衝撃や振動で壊れていないか健全性を確認したり、船外から取り込んだ実験装置のサンプルを交換するような作業は、宇宙飛行士がやるしかありません。こういった宇宙飛行士しかできない作業により多くの時間を割けるようになったので、これまでに比べて、より多くの宇宙実験を、より短い期間で行うことができるようになってきました。
現在のところ、エアロックに関わる操作も、ほとんど宇宙飛行士の手作業に頼っています。
船内側の扉を開けて、スライドテーブルに搬出する実験機器を取り付け、船内側の扉を閉めた後に、バルブを操作してエアロックの中の空気を抜きます。
エアロックの内部が真空になったところで、地上の管制官にバトンタッチ。地上からのコマンドで船外側の扉が開き、KIBOTTの操作するロボットアームが、スライドテーブルから実験機器を取り外し、「きぼう」の外側に実験装置を設置するのです。
実は、わたしの宇宙滞在中には、エアロックの中を真空にするバルブ操作も地上からコントロールできるようなシステムの改善が計画されています。
こうやって少しずつ経験や実績を重ねながら、運用方法やシステムを改善し、より安全に、より効率的に、より高い信頼性をもって「きぼう」の運用が行わるような絶え間ない努力が続けられています。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |