ISS・きぼうマンスリーニュース第30号
最終更新日:2015年10月 2日
トピックス
宇宙ステーション補給機「こうのとり」5号機(HTV5)、ミッション完了
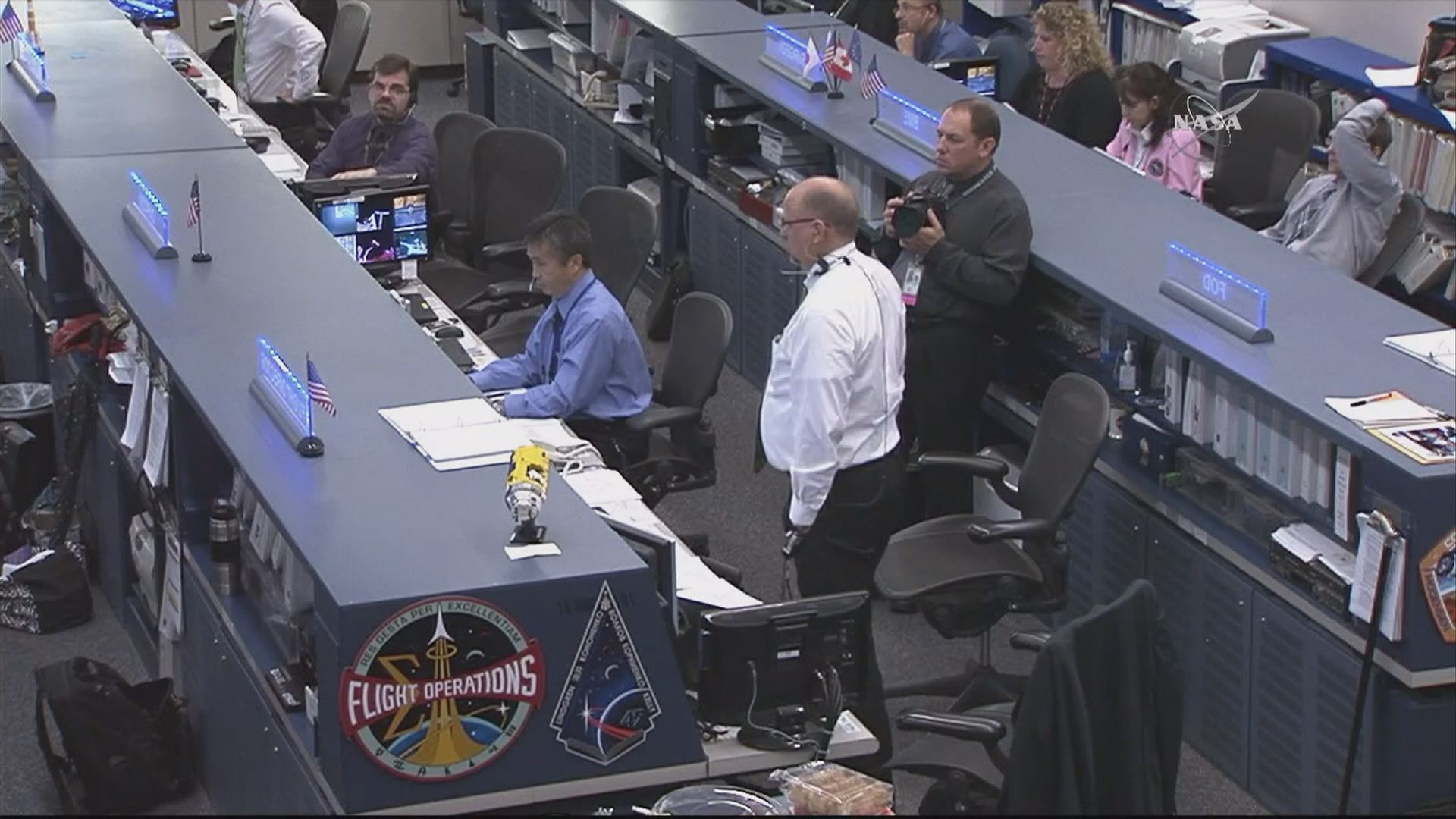
「こうのとり」5号機の大気圏再突入時のHTV運用管制室の様子(筑波宇宙センター)(9月30日撮影)

ISSから離れて行く「こうのとり」5号機(9月29日撮影)(出典:JAXA/NASA)

「こうのとり」5号機のハッチを閉める油井亀美也(右)、チェル・リングリン(左)両宇宙飛行士(9月29日撮影)(出典:JAXA/NASA)
9月30日午前5時33分頃、宇宙ステーション補給機「こうのとり」5号機は、大気圏に再突入して約42日間のミッションを完了しました。
「こうのとり」5号機は、小動物飼育装置(MHU)、静電浮遊炉(ELF)、高エネルギー電子・ガンマ線観測装置(CALET)という新たな実験装置を運び、「きぼう」日本実験棟の利用の可能性を広げました。
また、多目的実験ラック2(MSPR-2)を運び「きぼう」日本実験棟の船内実験室に設置されました。MSPR-2は、主に電力や通信インタフェースなどを実験機材に提供し、普段の実験室に近い感覚で利用できる作業空間をもつ多目的なラックの2台目です。
その他実験関連としては、宇宙空間に曝して宇宙環境の影響を調べる試料、超小型衛星(ブラジリア大学が開発した超小型衛星(SERPENS)、千葉工業大学の流星観測衛星(S-CUBE))を運びました。
他にもISSの運用維持に必要なシステム機器や補用品、宇宙飛行士の生活のための食料品、飲料水、衣類、衛生用品など合計約5.5トンの物資を運びました。
「こうのとり」は、使用済みの資材や役割を終えた実験装置など最大6トンの貨物を搭載して大気圏に再突入させる役割も担います。
5号機では、船内に搭載した不要品のほか、日本の超伝導サブミリ波リン無放射サウンダ(SMILES)とポート共有実験装置(MCE)、米国のSTP-H4(Space Test Program - Houston 4)の大型の船外装置を搭載して、大気圏に再突入しました。
「こうのとり」の把持ではロボットアームの操作を行った油井宇宙飛行士、筑波宇宙センターの運用管制チーム、若田宇宙飛行士がCAPCOM(ISSとの交信役)のリーダを務めたNASAの運用管制チームが協力して成功に導きました。
また、世界最大級の補給能力とともに「こうのとり」の特徴のひとつである打上げ直前に積み込み、ISS結合後には早く取り出すことができる速達サービス(レイトアクセス)と呼ばれる機能を使って新鮮な果物の搭載やNASAからの急な依頼であった水再生システムの交換部品(フィルタやポンプ)などを搭載することができました。

「こうのとり」5号機とナイル川流域の夜景(9月24日撮影)(出典:JAXA/NASA)

「こうのとり」5号機分離時のNASA管制室での若田宇宙飛行士(ジョンソン宇宙センター)(9月28日撮影)(出典:JAXA/NASA)
今月のきぼう
「きぼう」船内実験室運用開始から2675日経過しました
「きぼう」から生まれた実験成果が発表されました(Medaka Osteoclast実験)
実験成果発表(Medaka Osteoclast)
メダカへの給餌の様子(飼育開始55日目)
東京工業大学の工藤明教授を代表研究者とする『メダカにおける微小重力が破骨細胞に与える影響と重力感知機構の解析』実験の結果の一端が9月 21日、英国のオンラインジャーナル「サイエンティフィック リポーツ(Scientific Reports)」で公開されました。
2012年に2ヵ月間ISSの微小重力環境下で飼育されたメダカの骨組織を蛍光解析と組織解析した結果、メダカの喉の奥にある咽頭歯骨の骨量減 少が見られ、その原因として、骨を破壊(吸収)する破骨細胞の活性化が進んでいることが発表されました。
宇宙の微小重力環境下での破骨細胞活性化、それに伴う骨量減少メカニズムの一端を定量的に示した世界で初めての成果となります。
骨量減少の原因解明は、長期の有人宇宙探査における重要な課題であり、また、その成果は地上の老人性骨粗鬆症の予防などにも役立てられることが期待されています。
実験には、JAXAが開発した水棲生物実験装置(AQH)という宇宙用水槽が使用されました。給餌、飼育水の浄化と温度・流量・酸素などの環境維持、ビデオ観察などが自動化されたことにより、世界で初めて宇宙で2ヵ月間もの長期にわたり魚が飼育できたことに伴う成果です。
タンパク質結晶、地上に帰還
高品質タンパク質結晶生成実験(JAXA PCG)の第2期第3回が7月24日から9月11日まで行われました。実験サンプルは油井宇宙飛行士とともにISSに到着し、約1ヵ月半、「きぼう」日本実験棟でタンパク質の結晶生成が行われました。得られたタンパク質結晶は研究者に順次渡され、放射光施設を利用した解析作業に進みます。
本実験は、密度や温度の違いによって生じる対流が起こらないISSの微小重力環境を利用し、地上で得られるよりも高品質なタンパク質結晶を生成する実験で、医療分野などにおいて大きな成果が期待されています。今回は、民間企業も含めた18機関のサンプルがISSに運ばれ、輸血代替物(人工血液)候補の安全性・有効性を確認するための実験、ヒトiPS細胞の品質を高めるための実験、多剤耐性菌(複数の抗生物質に対して抵抗性を持つ細菌)に対する新たな抗菌薬の開発を目的とした実験などのための結晶生成が行われました。
超小型衛星放出

小型衛星放出機構から放出される超小型衛星「SERPENS」(出典:JAXA/NASA)
9月17日、「きぼう」から超小型衛星2基が放出されました。油井宇宙飛行士による衛星放出のコマンド操作で、日本の「S-CUBE」が放出され、続いて筑波宇宙センターの「きぼう」運用管制チームからのコマンドによりブラジルの「SERPENS」が放出されました。
「きぼう」からの超小型衛星の放出機会は広がりを見せており、現在もさまざまなプロジェクトが進行中です。
JAXAは国連宇宙部(UNOOSA)との連携協力を9月8日から開始しました。「きぼう」からの超小型衛星の利用機会を発展途上国等に提供し、それらの国々の宇宙関連技術の向上に貢献していきます。
今月の国際宇宙ステーション(ISS)
最初のISS構成要素打上げから6160日経過しました
第45次長期滞在クルー
スコット・ケリー(NASA)、ミカエル・コニエンコ(ロシア)宇宙飛行士のISS滞在は188日経過しました。オレッグ・コノネンコ、チェル・リングリン、油井宇宙飛行士のISS滞在は71日経過しました。セルゲイ・ヴォルコフ(ロシア)宇宙飛行士のISS滞在は、28日経過しました。
短期滞在ミッション実施

INTERACT実験のローバ(出典:JAXA/ESA)
9月2日、第45次/第46次長期滞在クルーのセルゲイ・ヴォルコフ宇宙飛行士と、短期滞在クルーのアンドレアス・モーゲンセン、アイディン・アイムベトフ両宇宙飛行士の3名を乗せたソユーズTMA-18M宇宙船(44S)が、カザフスタン共和国のバイコヌール宇宙基地から打ち上げられました。
44Sは、9月4日にISSにドッキングし、ISSは一時的に9名体制となりました。
9月12日には、2015年3月以来ISSに滞在していたゲナディ・パダルカ宇宙飛行士と、短期滞在クルーのモーゲンセン、アイムベトフ両宇宙飛行士の3名を乗せたソユーズTMA-16M宇宙船(42S)がISSから帰還し、ISSは再び6名体制に戻りました。
パダルカ宇宙飛行士の今回のISS滞在期間は、約168日でした。今回のミッションで、パダルカ宇宙飛行士の宇宙滞在日数は合計で約879日となり、これまでロシアのセルゲイ・クリカレフ宇宙飛行士が記録していた803日という宇宙滞在合計日数の最長記録を更新しました。
クルーの交替が行われる一方で、ISSでは、実験も継続して行われています。
9月7日には、欧州宇宙機関(ESA)のINTERACTと呼ばれる実験が行われました。この実験は、ISSから地上のローバーを操作して、ローバーに精密な作業を行わせる技術を実証するものです。モーゲンセン宇宙飛行士は、リアルタイムでの力のフィードバック機能を持つジョイスティックをISSで操作し、地上のふたつのアームを持つローバーを制御しました。実験では、アームで掴んだピンを小さな穴に通す操作が行われました。モーゲンセン宇宙飛行士は、ピンからアームに伝わる力をジョイスティックで感じ取りながらアームを遠隔操作し、ピンを穴に入れることに成功しました。
ESAは、将来の有人惑星探査において、宇宙飛行士の代わりに探査用ローバーなどのロボットを惑星に降ろし、惑星を周回する宇宙船から宇宙飛行士がロボットを操作して高度な作業を行わせる構想を考えています。