このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


3日目(Flight Day 3: FD3)
- ランデブ用軌道制御
- ISSからのスペースシャトルの熱防護システムの撮影(ランデブ・ピッチ・マヌーバの実施)
- ISSとのドッキング、ハッチの開放、ISSへの入室およびクルー歓迎
- ISS長期滞在クルーの交替
- 第1回船外活動準備
- SLP-D1のペイロードベイ(貨物室)からの取出し
熱防護システム(TPS)の損傷点検
国際宇宙ステーション(ISS)の下方約180mの地点でスペースシャトルを360度縦方向に回転させるランデブ・ピッチ・マヌーバ(Rendezvous Pitch Maneuver: RPM)を行い、この間にスペースシャトルの熱防護システム(Thermal Protection System: TPS)に損傷がないかどうかISS長期滞在クルー2名が望遠レンズを取り付けたデジタルカメラで撮影します。

RPMのイメージ
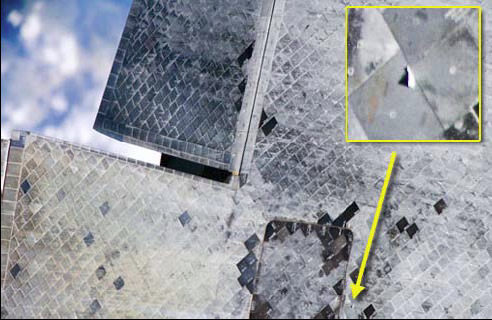
RPM時に、ISSから撮影された耐熱タイルの損傷箇所(STS-121ミッション)
ISSとのドッキング
コマンダーの手動操縦により、ISSの与圧結合アダプタ2(Pressurized Mating Adapter 2: PMA-2)に結合させます。オービタ・ドッキング・システム(Orbiter Docking System: ODS) の中央部に取り付けたカメラの映像を見ながら、スペースシャトルをISSに接近させます。土井宇宙飛行士は、ドッキング時に、ランデブオペレーション接近プログラム(Rendezvous and Proximity Operation: RPOP)というラップトップ上のプログラムに表示される、ISSとの距離や接近率などの情報をコマンダーに伝える役目を担います。このISSのドッキング時の作業は、日本人としては初めての任務となります。

PMA-2にドッキングしたディスカバリー号(STS-120ミッション)
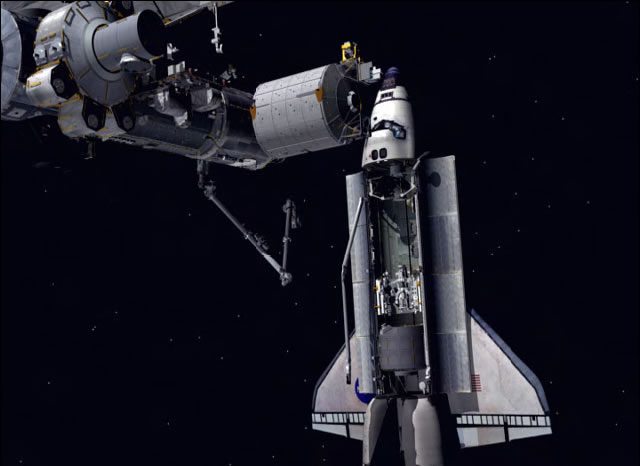
エンデバー号のドッキングイメージ(STS-123ミッション)
ISS入室

ISSに到着したスティーブ・フリック宇宙飛行士(左)を歓迎するペギー・ウィットソン宇宙飛行士(右)(STS-122ミッション)
ISSに入室したSTS-123クルーは、ISSの第16次長期滞在クルーのコマンダーであるペギー・ウィットソン、フライトエンジニアのユーリ・マレンチェンコおよびレオポルド・アイハーツに迎え入れられます。その後スペースシャトルのクルーはISSの安全説明を受けます。
ISS長期滞在クルーの交替
STS-122ミッション(2008年2月打上げ)から第16次長期滞在クルーとしてISSに滞在していた、欧州宇宙機関(ESA)のレオポルド・アイハーツ宇宙飛行士とギャレット・リーズマン宇宙飛行士の交替が行われます。リーズマン宇宙飛行士専用のシートライナーを緊急事態の際に地上に帰還するためのロシアのソユーズ宇宙船に取り付けた時点で、長期滞在クルーの交代は正式に完了します。リーズマン宇宙飛行士は第16次長期滞在クルーのフライトエンジニアとしてISSに滞在し、次回のSTS-124ミッションで帰還する予定です。
取外し可能型スペースラブパレット(SLP-D1)のISSへの取付け
ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)で、ペイロードベイ(貨物室)に搭載されている取外し可能型スペースラブパレット(Spacelab Pallet-Deployable 1: SLP-D1) を取り出し、モービルベースシステム(Mobile Base System: MBS)に設置します。
SLP-D1は、「デクスター」(特殊目的ロボットアーム)を打上げからISSに取り付けるまでの間収容しておく輸送キャリアです。
デクスターを取り出してISSに取り付けた後は、スペースシャトルのペイロード(貨物室)に再び搭載され、地上に回収されます。
第1回船外活動準備
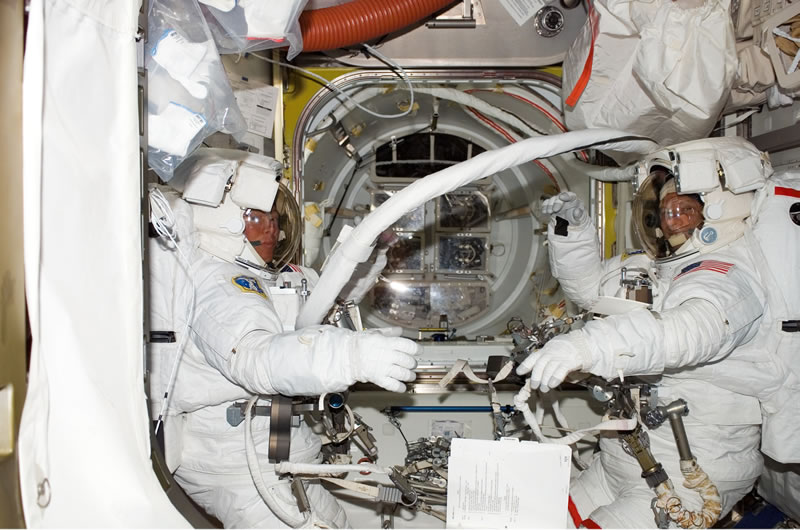
クエスト内部の様子(STS-121ミッション)
注:実際のキャンプアウト中はクルーは普段着で過ごします
クルー全員で第1回船外活動の手順を確認します。また第1回船外活動のクルー2名は「クエスト」(エアロック)内で一晩を過ごし(キャンプアウト)、気圧の低い環境(約0.7気圧)で体内からの窒素の排出を促し翌日の船外活動に備えます。
(写真、画像は全てNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |