このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で


2日目(Flight Day 2: FD2)
最終更新日:2008年3月10日
【ミッション概要】
- スペースシャトルのロボットアームとセンサ付き検査用延長ブーム(OBSS)を使用したRCCパネルの点検
- 宇宙服やドッキング機構等の点検
- ドッキング準備(ODSリングの伸長、ODS中央部へのカメラの取り付けなど)
- ランデブ用軌道制御
OBSSを使用したRCCパネルの損傷点検

点検のためにSRMSでOBSSを把持する様子(STS-122ミッション)
スペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)とセンサ付き検査用延長ブーム(Orbiter Boom Sensor System: OBSS)を使用してスペースシャトルの右翼側、ノーズキャップ、左翼側の順に強化炭素複合材(Reinforced Carbon Carbon: RCC)パネルの損傷の状況を点検します。
この作業は約6時間かけて行われ、今回のミッションでは土井、ドミニク・ゴーリ、グレゴリー・ジョンソン宇宙飛行士ら3人のクルーが担当します。
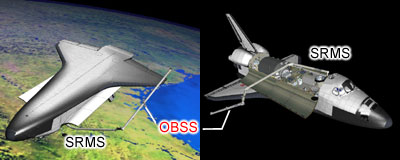
SRMSとOBSSを使用した軌道上での検査イメージ
宇宙服やドッキング機構等の点検
国際宇宙ステーション(ISS)とのドッキング前に、ランデブ/ドッキングで使用する装置類の準備や、船外活動で使用す
る宇宙服の点検を行います。
ドッキング準備
オービタ・ドッキング・システム(Orbiter Docking System: ODS)リングの展開やセンターライン・カメラの取り付けを行い
ます。スペースシャトルのISSへの接近・ドッキングは、このカメラの映像を見ながら行われます。
ランデブ用軌道制御
ISSとのランデブのため、3回の軌道制御を行います。
(写真、画像は全てNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |