このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


「デクスター」(特殊目的ロボットアーム)

SLP-D1への収容のためクレーンで吊り下げられるデクスター(提供:NASA)
「デクスター」(特殊目的ロボットアーム)は、ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)の技術を応用して、カナダ宇宙庁(CSA)が設計・開発したロボットアームです。
デクスターは、人間の上半身のような形をしており、SSRMSに取り付けて使用されます。デクスターの登場により、これまではクルーが船外活動で行っていたような複雑な作業を、ロボット操作で行うことができるようになります。
デクスターは、取外し可能型スペースラブパレット1(Spacelab Pallet-Deployable 1: SLP-D1)に収容されて打ち上げられ、軌道上で船外活動により組み立てられます。
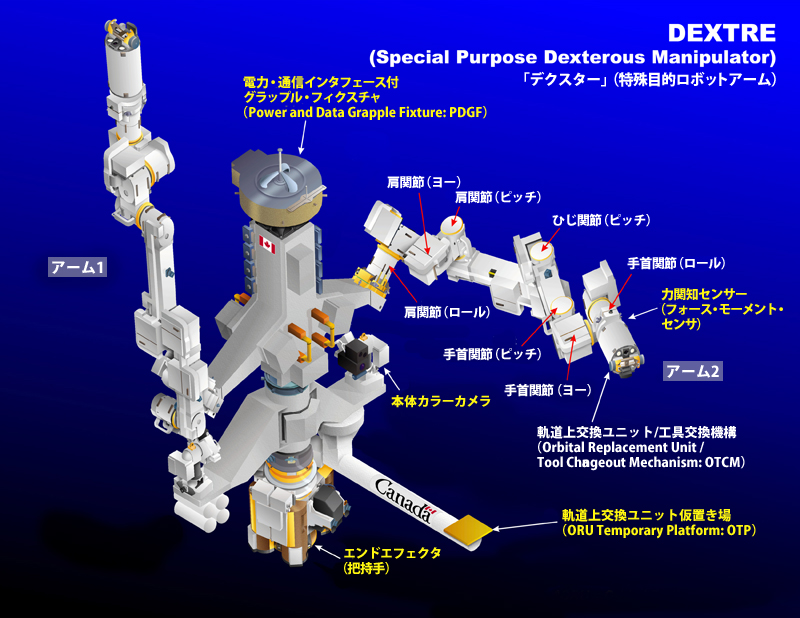
「デクスター」(特殊目的ロボットアーム)の構造
「デクスター」(特殊目的ロボットアーム)(クA躰a href="http://www.space.gc.ca">CSA)
デクスターには、2本のアーム、照明、TVカメラ、2本のアームの先端に取り付けて使用するための4つの工具、および軌道上交換ユニット(Orbital Replacement Unit: ORU)の仮置き場(ORU Temporary Platform: OTP)が装備されています。
本体の両脇に取り付けられたふたつのアームには、それぞれ7つの関節があり、動きに大きな自由度があります。また、センサで様々な力を感知し、ISS船外の細かいメンテナンスや船外作業支援を行うことができます。
両アームの先には、軌道上交換ユニット/工具交換機構(Orbital Replacement Unit /Tool Changeout Mechanism: OTCM)という把持機構が装備されており、ペイロードや工具を把持する手の役割をします。OTCMにはボルトを絞めたり緩めたりするためのソケットや、ペイロードに電力・データなどを供給するためのコネクタ、照明も装備されています。
本体の両脇には、カラーテレビカメラがそれぞれ1台ずつ装備されており、ISS船内のクルーや地上の技術者が、ISSからの視界では直接確認できない細かい作業をモニタすることができます。
| 項目 | 値 |
|---|---|
| 重量 | 1,688kg |
| 長さ | 3.66m(本体) 3.51m(本体肩部からOTCMの先端まで) |
| 取扱い重量 | OTP=最大600kg OTCM=最大600kg エンドエフェクタ(把持手)=最大1,000kg |
取外し可能型スペースラブパレット1(SLP-D1)
SLP-D1に搭載されたデクスター(提供:NASA)
取外し可能型スペースラブパレット1(Spacelab Pallet-Deployable 1: SLP-D1)は、巨大な機器や宇宙空間への曝露が必要な機器などを収容して打ち上げるためのU字型のプラットフォームです。
SLP-D1は、全長約3.5m、幅約4mで、スペースシャトルのペイロードベイ(貨物室)に固定するための取付け部が5箇所付いています。
1J/Aミッションでは、SLP-D1はデクスターを収容して打ち上げられ、デクスターを軌道上で取り出した後は、スペースシャトルのペイロードベイ(貨物室)に再び搭載され、地上に戻されます。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |