このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


ミッション概要
2J/Aミッション(STS-127ミッション)は、スペースシャトルにより「きぼう」日本実験棟の船外実験プラットフォームと船外パレットを打ち上げ、船外実験プラットフォームと船外パレットに搭載した装置を国際宇宙ステーション(ISS)に取り付けることを目的としたISSの組立フライトです。米国のキャリアでISSの曝露機器の予備品も運搬します。
2J/Aミッションは、3回に分けて打ち上げられる「きぼう」の打上げ第3便にあたり、いよいよ「きぼう」が完成します。
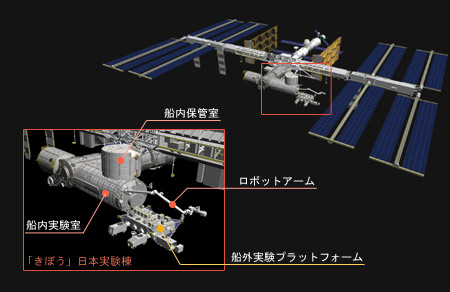
まず初めに、船外実験プラットフォームを船内実験室に取り付けます。その後、船外パレットを船外実験プラットフォームに取り付け、「きぼう」ロボットアームで、船外パレットに搭載した装置を船外実験プラットフォームに設置します。船外パレットは地上に回収するため、再びスペースシャトルに搭載されます。
![]()
JAXAの2J/Aミッションロゴ(上)とNASAのSTS-127ミッションパッチ(提供:NASA)(右)

2J/Aミッション終了後のISSの外観予想図
ミッションの内容は、主に以下の通りです。
「きぼう」船外実験プラットフォームの取付け・起動
スペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)とISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)を使用して、「きぼう」船外実験プラットフォームを「きぼう」船内実験室に取り付け、起動します。SSRMSの操作は若田宇宙飛行士が行い、「きぼう」を完成させます。
「きぼう」船外実験プラットフォームへの実験装置移設・起動
船外パレットで運んだ実験装置を船外実験プラットフォームに設置して起動します。「きぼう」の船外実験を開始する準備を行います。なお、「きぼう」ロボットアームは初の実運用となります。
若田宇宙飛行士の帰還
若田宇宙飛行士は、約3ヶ月半にわたるISS長期滞在を終了して、エンデバー号で地上に帰還します。
ISSの曝露機器の運搬
米国の曝露機器輸送用キャリアでISSの曝露機器の予備品を運搬します。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |