このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で


第2回船外活動
最終更新日:2008年3月10日


実施日:飛行6日目
担当:リチャード・リネハン、マイケル・フォアマン両宇宙飛行士
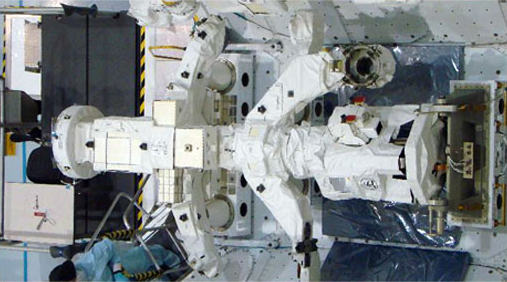
第2回船外活動では、第1回船外活動に引き続き、「デクスター」(特殊目的ロボットアーム)の軌道上組立て作業を行います。
「デクスター」(特殊目的ロボットアーム)の軌道上組立て

軌道上でのデクスターの組立てイメージ
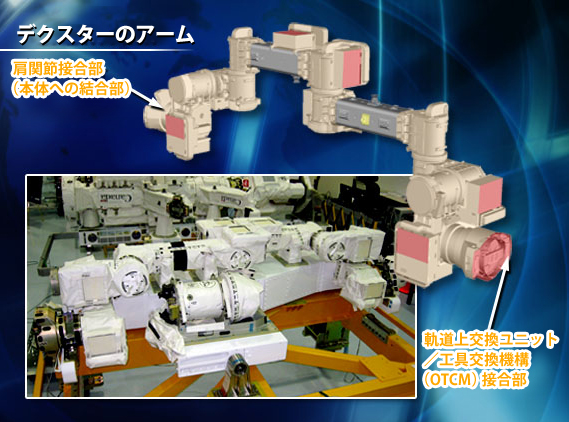
デクスターのアーム
デクスターの本体
取外し可能型スペースラブパレット(Spacelab Pallet-Deployable 1: SLP-D1)に固定された状態のデクスターの2本のアームを、本体に取り付けます。
アームのデクスター本体への取付け
アームの取外し
デクスターの2本のアームの固定を取り外し、仮置きします。
固定ボルトの解除
デクスター本体の固定ボルトを解除し、上体を引き起こします。これにより、ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)でデクスターを把持できるようになります。
アームの取付け
デクスターの2本のアームを本体に取り付けます。
断熱カバーの取外し
デクスターの各パーツを保護するために覆っていた断熱カバーを取り外します。
(写真、画像は全てNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |