このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


第1回船外活動


実施日:飛行4日目
担当:リチャード・リネハン、ギャレット・リーズマン両宇宙飛行士
第1回船外活動では、「きぼう」日本実験棟船内保管室を「ハーモニー」(第2結合部)に取り付けるための準備作業や、「デクスター」(特殊目的ロボットアーム)の軌道上組立て作業を行います。
船内保管室の取付け準備完了後、土井宇宙飛行士がスペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)を操作して、船内保管室をスペースシャトルのペイロードベイ(貨物室)から取り出し、ハーモニーに設置します。
船内保管室の取付け準備
ペイロードベイ(貨物室)内に固定されている船内保管室をハーモニーに設置するための準備として、以下の作業を行います。
共通結合機構(Common Berthing Mechanism: CBM)のカバーの取外し
船内保管室のハーモニーへの結合部となるパッシブ共通結合機構(Passive Common Berthing Mechanism: PCBM)に取り付けられているカバーを取り外します。
ヒータケーブルの取外し
スペースシャトルから船内保管室にヒータ電力を供給するためのヒータケーブルを取り外し、ペイロードベイ(貨物室)内のケーブル収納箱に収納します。

ペイロードベイ(貨物室)に搭載された船内保管室(提供:NASA)
ハーモニー天頂側の共通結合機構(CBM)ハッチ窓の断熱カバーの開放
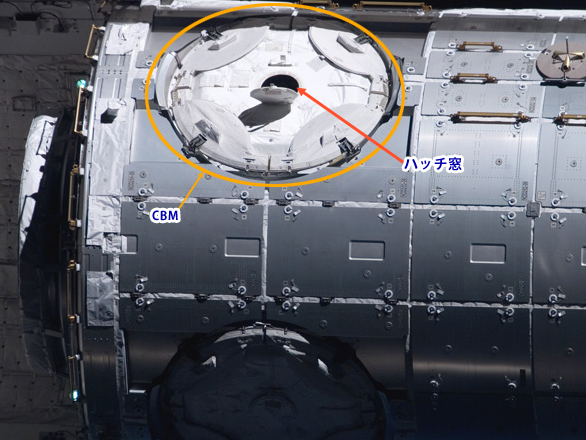
ハーモニーのCBMとハッチ窓(提供:NASA)
ハーモニー天頂側の共通結合機構(CBM)のハッチ窓の断熱カバーを開放します。
これにより、ハーモニーのCBM内側に設置した接近操作用のカメラから、船内保管室が接近する様子を確認できるようになります。
「デクスター」(特殊目的ロボットアーム)の軌道上組立て
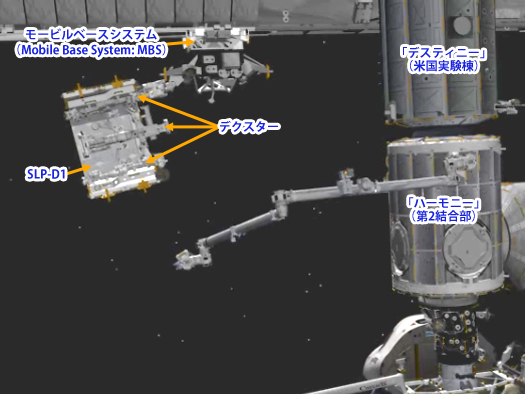
ISSに設置されたSLP-D1に固定された状態のデクスター(提供:NASA)
デクスターの組立て作業として、最初に以下の作業を行います。
アームへの軌道上交換ユニット/工具交換機構(OTCM)の取付け
取外し可能型スペースラブパレット(Spacelab Pallet-Deployable 1: SLP-D1)に固定された状態のデクスターの2本のアームの先端に、軌道上交換ユニット/工具交換機構(Orbital Replacement Unit/Tool Changeout Mechanism: OTCM)を取り付けます。
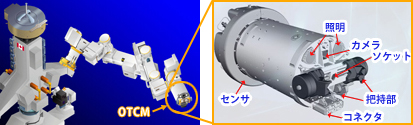
アーム先端のOTCM(クA躰a href="http://www.space.gc.ca">CSA/提供:NASA)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |