このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。



- JAXA宇宙飛行士によるISS長期滞在
- 若田光一宇宙飛行士
- ISS第38次/第39次長期滞在
- ISS第18次/第19次/第20次長期滞在
- 関連ページ
@Astro_Wakata からのツイート
若田宇宙飛行士のコマンダー(船長)への道
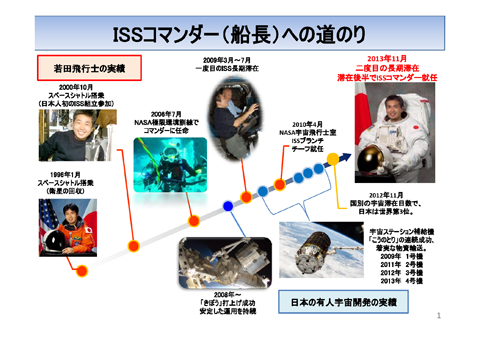
若田宇宙飛行士の歩み[PDF:640KB](出典:JAXA)
このコーナーは、若田宇宙飛行士が1992年に宇宙飛行士候補者に選抜された後の、三度の宇宙滞在ミッションなどをまとめています。
若田宇宙飛行士が宇宙飛行士を目指してからコマンダーに任命されるまでの半生を綴ったプロフィールダイジェストもどうぞ。
もくじ
- 1st mission:STS-72ミッション(1996年)
- 2nd mission:STS-92ミッション(2000年)
- 第10回NASA極限環境ミッション運用(NEEMO)参加(2006年)
- 3rd mission:ISS第18次/第19次/第20次長期滞在(2009年)
- 参考
1st mission:STS-72ミッション
(1996年1月11日~1月20日(日本時間))

STS-72ミッションのクルー
若田宇宙飛行士が初めてアサイン(任命)されたミッションは、ミッション・スペシャリスト(搭乗運用技術者:MS)として、スペースシャトル「エンデバー号」(STS-72ミッション)に搭乗するミッションでした。MSは、宇宙での実験を専門に行うペイロードスペシャリスト(PS)とは異なり、宇宙実験はもとより、スペースシャトル本体の操作、船外活動など、宇宙での広範な活動を行うことができる宇宙飛行士です。
当時はまだ国際宇宙ステーション(ISS)は準備の段階にあり、構成要素の打上げは行われておらず、高度300km前後で地球を周回しながら、スペースシャトル内外で実施するミッションでした。
ミッションでは、訓練時から定評のあったロボットアームの操作が主な任務でした。スペースシャトルの船内(フライトデッキ)よりロボットアーム(Shuttle Remote Manipulator System: SRMS)を操作して、日本の人工衛星「宇宙実験観測フリーフライヤ(SFU)」の回収やNASAの人工衛星の放出・回収を行いました。

SRMSによるSFUの把持
また、船外活動(Extravehicular Activity: EVA)が行われた際に、作業支援のためフライトデッキの操作卓からSRMSを操作し、EVAクルーをSRMSの先端に載せて移動させるなどの作業を行いました。
そのほか、実験作業も行い、蛋白質結晶成長実験や、宇宙医学実験のためにデータ取得を行いました。
2nd mission:STS-92ミッション
2000年10月12日~10月25日(日本時間)

STS-92ミッションの打上げ
2回目のミッションは日本人として初めてのISS建設への参加でした。ISSは1998年から建設が開始し、若田宇宙飛行士は、ISS組立てのための7回目のミッションであるスペースシャトル「ディスカバリー号」(STS-92ミッション)にMSとして搭乗しました。
STS-92ミッションは、フライトディレクタやコマンダーがとても複雑であるとコメントしており、若田宇宙飛行士も連日のようにロボットアームを操作して、ISSの重要な構成要素であるZ-1トラスと与圧結合アダプタ(PMA-3)のISSへの取付けやEVA支援のためのロボティクス操作等を担当しました。

ディスカバリー号(STS-72ミッション)から撮影したドッキング前のISS

スペースシャトル内で作業する若田宇宙飛行士
Z-1トラスの取付けでは、電気供給系のショートがあり、ロボットアームの操作上重要である宇宙視覚システム(ISSと機器、ロボットアーム間の相対距離や位置などを測定するシステム)が使えなくなるというトラブルが発生しました。限られた時間内で急きょ電気工事を行ってからの作業となりましたが、見事取付けに成功しました。PMA-3の取付け作業でも、訓練時に使用したシミュレータと実際の操作時のISSの状況が異なっていましたが、仲間のクルーと協力して、無事解決しました。
その後もロボットアームを使用したEVAの支援が連日にわたり行われましたが、若田宇宙飛行士はひとつひとつこなし、ミッションの成功に大いに貢献しました。
第10回NASA極限環境ミッション運用(NEEMO)にコマンダーとして参加
2006年7月22日~28日(米国時間)
若田宇宙飛行士は、NASAの極限環境ミッション運用(NASA Extreme Environment Mission Operations: NEEMO)訓練にコマンダーとして参加しました。コマンダーは、チームのリーダーとして、訓練の指揮・取りまとめを行いますが、NASA以外の宇宙飛行士がコマンダーに選ばれるのは異例でした。
NEEMO訓練は、米国フロリダ州沖合の海底約20mに設置した米国海洋大気庁(NOAA)の「アクエリアス」と呼ばれる閉鎖施設内で生活を行い、リーダーシップやチームワーク、自己管理等の能力を向上させることを目的にした訓練です。
訓練では、海底を宇宙環境にみたてた船外活動として、将来の月・火星探査で使用する次世代宇宙服開発の試験を行ったほか、遠隔操作によるローバー(Remotely Operated Vehicle: ROV)を使用した構造物の建設、通信や航法の技術確認を行いました。
若田宇宙飛行士はコマンダーとして、仲間のクルーが士気を保てるよう、ひとりひとりにハイライトのある作業を割り振るなど工夫しつつ、クルーの疲労が蓄積しないよう、リーダーとして気を配り、NASAからも高い評価を得ました。
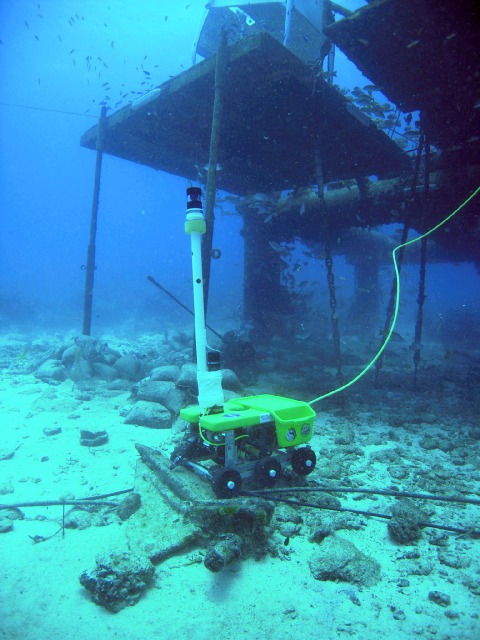
ローバー(ROV)

ローバー(ROV)アクエリアス内でデータに目を通す若田宇宙飛行士

船外活動の様子
3rd mission:ISS第18次/第19次/第20次長期滞在
2009年3月16日~2009年7月16日(日本時間)
若田宇宙飛行士は、ISS第18次/第19次/第20次長期滞在クルーとして、日本人として初めてISSに4か月ほど長期滞在しました。
ISSに到着して早速、ISSの大きな構成要素であるS6トラスのISSへの設置作業やEVAの支援のため、ISSのロボットアーム(Space Station Remote Manipulator System:SSRMS)や「デクスター」(特殊目的ロボットアーム)のロボティクス操作を行いました。
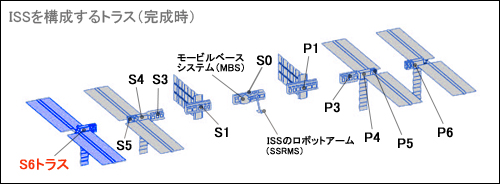
S6トラスはISSの右舷側先端に取り付けられました。
長期滞在最初は、意気込むあまり、休日も含め働きすぎてしまったこともありましたが、コマンダーの助言で休みをもらうなど、仲間と励ましあいながら長期滞在ならではの運用面に力を入れました。「JAXA軌道上実験主任」(JAXAサイエンス・オフィサー)として、運用の始まった「きぼう」船内実験室での実験を行い、また、「おもしろ宇宙実験」などの教育実験にも精力的に取り組んで、その様子を一般に披露しました。

「きぼう」船内実験室で冷凍・冷蔵庫(MELFI)の作業を行う若田宇宙飛行士ら
滞在の最後には、「きぼう」日本実験棟の打上げ第3便にあたる2J/Aミッション(STS-127ミッション)として、スペースシャトル「エンデバー」が到着し、若田宇宙飛行士は、SSRMSを操作し、SRMSを操作するNASAの宇宙飛行士と連携して、船外実験プラットフォームや船外実験装置の取付け作業を成功させ、日本時間の2009年7月19日、「きぼう」が完成しました。
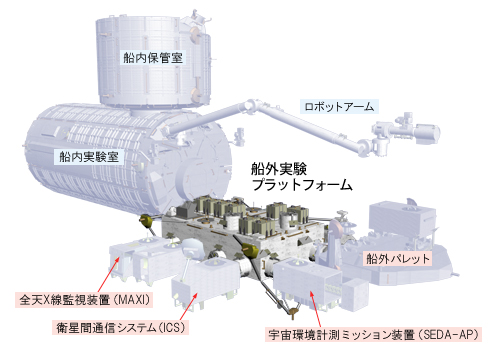
取り付けた船外実験プラットフォームと船外実験装置(船外パレットは持ち帰り)
若田宇宙飛行士は、ロボティクスシステムの専門技術者として、長期滞在中、ISS、スペースシャトルの4種類全てのロボットアーム*を運用したことになりました。
*ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)、スペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)、「デクスター」(特殊目的ロボットアーム)、「きぼう」ロボットアーム
記載がない限り、写真の出典はいずれもJAXA:NASAです。
参考
若田宇宙飛行士のこれまでの宇宙滞在日数
| フライト名 | 宇宙滞在日数 | |
|---|---|---|
| STS-72ミッション | 8日22時間01分 | |
| STS-92ミッション | 12日21時間43分 | |
| ISS第18次/第19次/第20次長期滞在 (STS-119、STS-127ミッション含む) |
137日15時間05分 | |
| 合計 | 159日10時間49分 | |
注:秒処理の関係で、誤差が生じる場合があります。
若田宇宙飛行士をもっと良く知るためのお勧め図書
新しく発行された順に掲載しています。
- 『宇宙飛行士 若田光一物語』学習まんがシリーズ 小学館(2012)
- 若田光一・岡田茂『宇宙がきみを待っている』汐文社(2011)
- 若田光一『宇宙飛行 行ってみてわかったこと、伝えたいこと』日本実業出版社(2011)
- 林公代『宇宙飛行士の育て方』日本経済新聞出版社(2010)
- 若田光一『国際宇宙ステーションとはなにか―仕組みと宇宙飛行士の仕事』ブルーバックス 講談社(2009)
- 若田光一・朝日新聞取材班『宇宙で過ごした137日 僕の「きぼう」滞在記』朝日新聞出版(2009)
- 若田光一『ぼくの仕事は宇宙飛行士』東京書籍(2001)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |