S6トラス
最終更新日:2009年03月10日
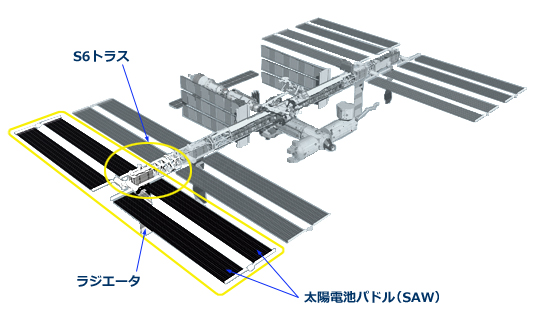
S6トラスの位置
S6トラスは、国際宇宙ステーション(ISS)に運ばれる最後のトラスで、ISSの右舷側先端に取り付けられます。S6トラスには、太陽電池パドル(Solar Array Wing: SAW)一対が収納されており、ISSに結合され、このSAWが展開されることにより、クルー6人体制に必要な電力をISSに供給することができます。
S6トラスの取付け/太陽電池パドル(SAW)の展開
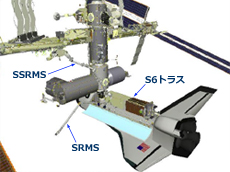
S6トラスの取出し/取付け
S6トラスは、ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)を使用して、飛行4日目にスペースシャトルのペイロードベイ(貨物室)から取り出され、飛行5日目にISSに取り付けられます。
一連のSSRMSの操作は、若田宇宙飛行士とジョン・フィリップス、サンドラ・マグナス宇宙飛行士が担当します。S6トラスの取出しから取付けまでの手順は、以下の通りとなります。
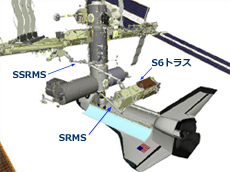
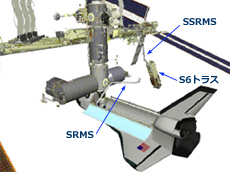
飛行4日目、SSRMSを使用して、S6トラスをスペースシャトルのペイロードベイ(貨物室)から取り出し(1)、その後、スペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)に受け渡します(2)。
(1)ペイロードベイ(貨物室)からの取出し
(2)SSRMSからSRMSへの受け渡し
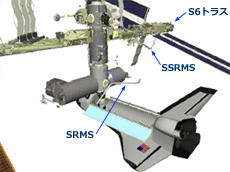
SRMSで把持している間に、SSRMSは、ISSトラスの右舷側(S6トラスを結合するための位置)まで移動して、再びSRMSからS6トラスを受け取ります(3)。
※S6トラスは翌日の結合まで、SSRMSで把持されたままの状態となります。
そして飛行5日目、S6トラスは、SSRMSによってISSの右舷側先端(S5トラス)に取り付けられます(4)。その後、船外活動によりケーブルの接続作業を行い、地上からのコマンドで起動されます。
(3)SRMSからSSRMSへの再受渡し
(4)S5トラスへの取付け
※このように、複雑な受け渡し作業を行う理由は、「きぼう」日本実験棟がISSに設置されているため、SRMSだけでは、ペイロードベイ(貨物室)からの取出し時に十分な間隔が確保できないためです。ロボットアーム操作の専門家である若田宇宙飛行士がこのフライトに任命されたことで、他のクルーの負荷は軽減されたといえます。
太陽電池パドル(SAW)の展開
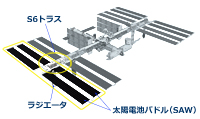
太陽電池パドル(SAW)展開後のISSイメージ
飛行5日目にS6トラスが地上から起動された後、ラジエータを展開し、飛行8日目に太陽電池パドル(Solar Array Wing:SAW)の展開を行います。
※飛行6日目の、スペースシャトルの強化炭素複合材(Reinforced Carbon Carbon: RCC)パネルの詳細点検の必要がないと判断された場合は、この作業は、飛行6日目に前倒しされる予定です。
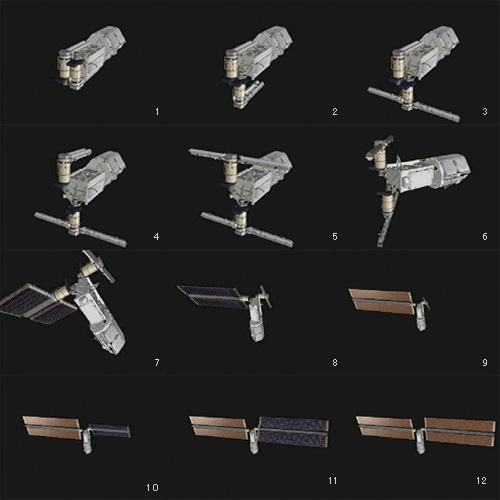
太陽電池パドル(SAW)の展開イメージ(1. S5トラスへの結合 2~3. マスト収納容器(MCA)片側の展開 4~5. MCAもう一方の展開 6~12. SAW展開)
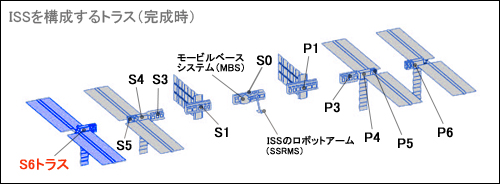
S6トラスの構成
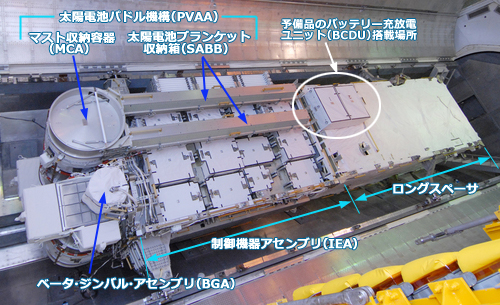
スペースシャトル搭載前のS6トラス(太陽電池パドル(SAW)を収納した状態)
S6トラスは、太陽電池パドル機構(Photovoltaic Array Assembly: PVAA)、制御機器アセンブリ(Integrated Equipment Assembly: IEA)、およびロングスペーサから構成されます。
| S6トラスの仕様 |
| 長さ |
約13.84m |
| 高さ |
約4.48m |
| 奥行き |
約4.97m |
| 質量 |
約14.09t(軌道上展開時) |
S6トラスは、STS-97(4A)ミッションで運ばれたP6 トラスと同様のトラスですが、バッテリー充放電ユニット(Battery Charge/Discharge Unit: BCDU)の予備品2個を運搬・軌道上保管できるよう改良されています。
太陽電池パドル機構(PVAA)
太陽電池パドル機構(PVAA)は、S6トラス先端の両側にそれぞれ1基ずつ装備されています(計2基)。展開後は太陽光を集めて電力に変換します。
PVAAは、太陽電池パドル(SAW)とベータ・ジンバル・アセンブリ(Beta Gimbal Assembly: BGA)から構成されています。
太陽電池パドル(SAW)
太陽電池パドル(SAW)の構成
SAWは、太陽電池ブランケット2枚、ふたつの太陽電池ブランケット収納箱(Solar Array Blanket Box: SABB)、マスト、マスト収納容器(Mast Canister Assembly: MCA)から構成されています。
SAWの2枚の太陽電池ブランケットには、大きさ8cm2のシリコン太陽電池がそれぞれ16,400枚ずつ貼り付けられており、シリコン太陽電池の枚数は合計で32,800枚になります。打上げ時は、厚さ約50cmに折り畳まれた状態でSABBに収納され、軌道上でマストを伸ばして展開されます。展開後のSAWの大きさは、(2枚で)幅約11.6m、長さ約35mになります。マストは引き込むこともできる設計になっており、軌道上で折り畳んで修理・回収を行うことができます。
太陽電池パドルの主要諸元
| 項目 |
値 |
| 太陽電池パドル1基の大きさ |
11.6m×35.5m |
| 太陽電池パドル1基の重量 |
約1,089kg |
| ブランケット1枚の大きさ |
4.57m×33.5m |
| 最大発生電力 |
パドル1基あたり:33kw
トラス1基(両翼):66kw *1
完成時(パドル8基(4式)):計264kw *1
*1:この最大発生電力は、太陽に対する角度などを理想条件下で計算したものであり、実効上の発生電力は以下の通りです。 |
| 実効上の発生電力 |
トラス1基(両翼):21~30kw
完成時(パドル8基(4式)):計84~120kw |
ベータ・ジンバル・アセンブリ(BGA)
BGAは、太陽電池パドル(SAW)を太陽方向に指向させたり、任意の角度に固定させるための機構です。BGAは、SAWを360度、両方向に回転させることができます。
制御機器アセンブリ(IEA)
IEAは電力を貯蔵すると共に、電圧を平滑化し、電力をISS各部に供給する役割を果します。また、IEAは太陽電池パドル機構(PVAA)を支える構造部としての機能も担っています。IEAは電力制御システム、熱制御システム(Photovoltaic Thermal Control System: PVTCS)から構成されています。
電力制御システム
電力制御システムは、電力供給を行う直流切替器(Direct Current Switching Unit: DCSU)、シーケンシャル・シャント・ユニット(Sequential Shunt Unit: SSU)で粗く平滑化された電力をさらに平滑化する直流変圧器(Direct Current to Direct Current Control Unit: DDCU)、そして蓄電システムから構成されています。
熱制御システム(PVTCS)

ラジエータ(収納時)
熱制御システム(PVTCS)は、コールドプレート(冷却板)8枚、2基のポンプ制御システム(Pump Flow Control System: PFCS)、ラジエータから構成されています。ラジエータにアンモニア冷媒を流し、IEAの余分な熱を宇宙空間へ放出します。
ロングスペーサ
ロングスペーサは、これらS6トラスの構成要素全体を支え、S4トラスの太陽電池パドルとの間隔を確保する役割を有します。
(写真、画像は全てNASA提供)