
今回のミッションでEVA(船外活動)とSSRMS(国際宇宙ステーションのロボットアーム)、SRMS(スペースシャトルのロボットアーム)の協調が必要な場面があることは以前お伝えしました。それぞれの訓練はそれぞれの訓練設備で行いますが(例えばEVAだったらNBL、ロボットアームだったらDynamic System Trainer (DST)などのシミュレータ、など)、なかなか協調作業を訓練するのは難しい。NBLでも動くロボットアームはありますが、設備側の制約で実際のロボットアームとは違ったりします。
特にお互いの交信と動きを把握して協力して作業をしなくてはならないケースの訓練で活躍するのが、ばーちゃる・りありてぃー(Virtual Reality(VR))です。
今回はEVクルーがヘッドマウントディスプレイを被り、コンピュータが作った仮想現実の世界でハンドレールを「掴み」ながら、どういう風に作業場所が見えるかなどを確認しつつ、ロボットアームのオペレータと交信して指示を出しました。アームのオペレータはEVクルーの指示に基づき、自分の前にあるカメラ画面で周りの構造物との距離などを確認しつつ、アームを動かします。

ヘッドマウントディスプレイを被って訓練するマイク。

奥にEVクルー、左にSRMSオペレータのカレン。手前にはIV(Intervehicular;船内でEVクルーに指示を出す役割)のケンと、全体を見ているコマンダーのマーク。写真の更に右にはSSRMS操作卓がある。
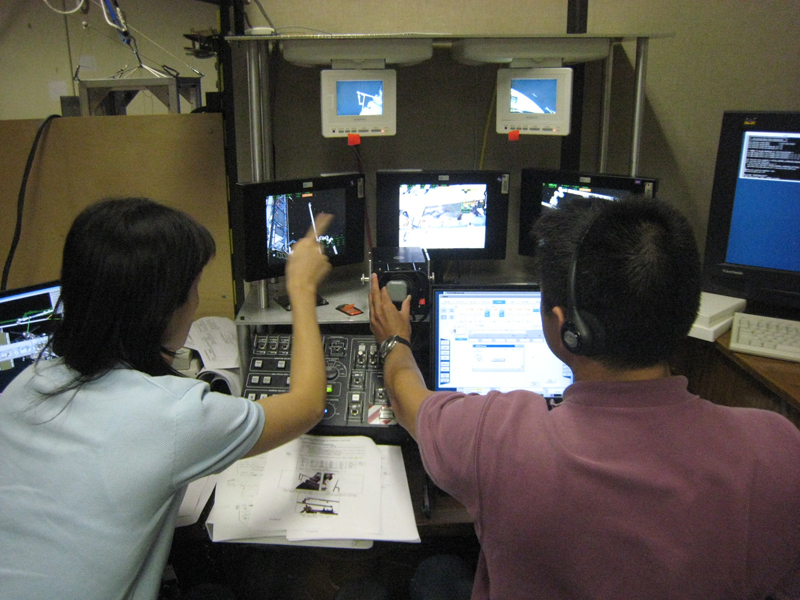
SSRMS操作卓。今回の訓練に参加できなかったISS側の飛行士に代わり、1Jミッションのロボティクス運用をサポートしてくれる山崎飛行士(左)がサポートしてくれた。
正直、VRが訓練として注目され始めた頃は「こんなん、訓練で使えるんか??」と思ってましたが(笑)、今やこういう訓練に欠かせない設備になりました。それぞれの訓練設備の長所短所を補いつつ、訓練は今後も続きます。