This is an archive of information released in the past.
Disclaimer: It may contain broken links or outdated information. Some parts may not function in current web browsers.
*Visit https://humans-in-space.jaxa.jp/en/ for the latest information.

About Kibo
Exposed Facility
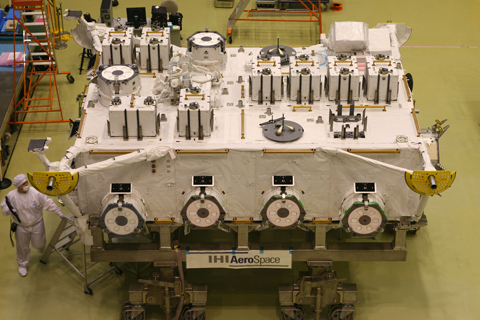
Exposed Facility: At Tsukuba Space Center (TKSC)
Overview

The Exposed Facility (EF) provides a multipurpose platform where science experiments can be deployed and operated in the exposed environment. The payloads attached to the EF can be exchanged or retrieved by Kibo's robotic arm, the JEM Remote Manipulator System (JEMRMS).
| Item | Specification |
|---|---|
| Shape | Box shaped |
| Width | 5.0m |
| Height | 3.8m |
| Length | 5.2m |
| Mass (at launch) | 4.1 tons |
| Number of payload attachment locations | 12 (including 2 for JEM system and 1 for temporary storage) |
| Power (provided from US segment) | Max. 11 kW 120V(Direct current) |
| Lifetime | More than ten years |
Structure
The EF is berthed to the Pressurized Module (PM). The Equipment Exchange Units (EEUs) located on the EF can accommodate a maximum of 12 payloads, including the EF experiments, Experiment Logistics Module-Exposed Section (ELM-ES), HTV-EP and the Inter-Orbit Communication System (ICS).
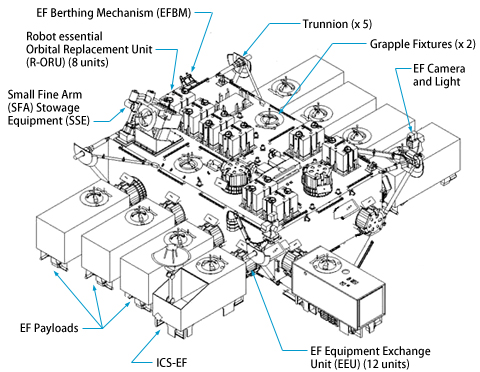
Structure of the EF
The following are the major EF hardware items.
EF Berthing Mechanism (EFBM)
EFBM
This mechanism connects the PM and EF. Once the EF is attached to the PM, the necessary resources, such as power, data and command communications and thermal control (coolant), will be provided from the PM.
The EF is equipped with the passive part of the EFBM (the active part is located on the PM).
Trunnion
This is a fixture for fastening the EF to the space shuttle's cargo bay, when the EF is launched.
Grapple Fixtures
SSRMS (Space Station Remote Manipulator System) or SRMS (Shuttle Remote Manipulator System) grapple here.
EF Camera and Light
This visual assembly unit consists of a TV camera, a light and a Pan/Tilt unit. It provides views of EF payloads or ORUs.
Equipment Exchange Unit (EEU)
This system connects EF payloads to EF and provides power, data and thermal control (coolant) to the payloads deployed on the EF.
Robot essential Orbital Replacement Unit (R-ORU) / Extravehicular Activity Orbital Replacement Unit (E-ORU)
The Electrical Power System (EPS), Data Management System (DMS), and Thermal Control System (TCS) for operating the EF are designed as Orbital Replacement Units (ORUs). In case of failure, these units can be exchanged on orbit. The EF stores two types of ORUs: Extravehicular Activity ORUs (E-ORUs) and Robot essential ORUs (R-ORUs). Four E-ORUs can be attached to the nadir side of the EF, and eight R-ORUs can be attached to the zenith side. The E-ORUs are to be exchanged by extravehicular activities. The R-ORUs are to be exchanged by the JEMRMS.
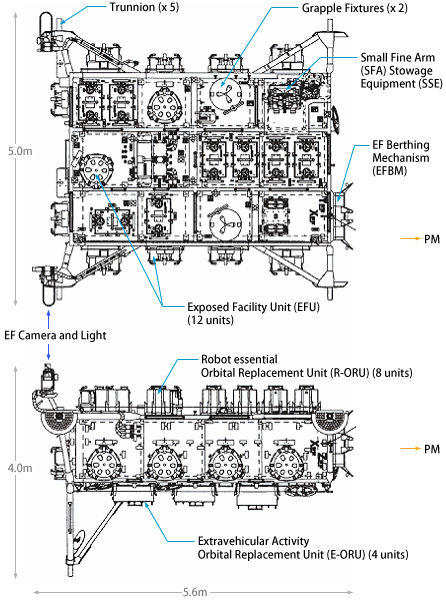
Structure of the EF
Current Status
The EF was launched on the STS-127 Mission (2J/A) and installed to the PM on July 19, 2009. Several payloads have been installed to the EF, and exposed experiments and earth observation are currently conducted.
| Copyright 2007 Japan Aerospace Exploration Agency | Site Policy |