このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で


「きぼう」ロボットアームの遠隔操作デモンストレーション#3を実施
最終更新日:2011年12月22日
「きぼう」日本実験棟のロボットアームの遠隔操作デモンストレーションを、日本時間12月6日に続き、日本時間12月20日に実施しました。
このデモンストレーションでは、筑波宇宙センター(TKSC)の「きぼう」運用管制室からのコマンドにより、「きぼう」ロボットアームを遠隔操作します。現在、ISS全体として、ロボティクス運用に関わる軌道上クルーリソース(作業に要する時間)を節減するという観点から、ロボティクス運用を地上からの遠隔操作で実施する運用方式を主とする必要性が生じてきています。
12月20日のデモンストレーション#3では、先端位置姿勢制御(FOR OCAS)モードにて、親アームを船外実験プラットフォーム上にあるグラプル・フィクスチャ(把持部)へ段階的に接近させ、最終的に親アームのエンドエフェクタ(把持手)にてグラプル・フィクスチャを把持しました。その後、エンドエフェクタの把持を解放し、親アームを通常の保管姿勢に戻しました。
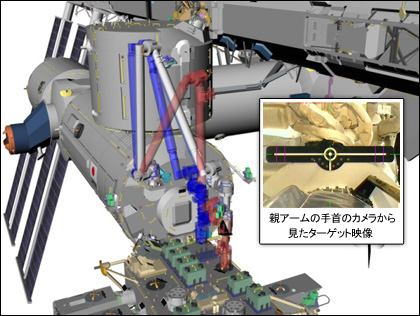
Demo#3の実施イメージ(出典:JAXA)
今後は、宇宙ステーション補給機「こうのとり」3号機(HTV3)のフライトにおいて、曝露パレットの取外し運用を遠隔操作で行う予定です。また、子アームの遠隔操作についても検討を開始する予定です。
- 「きぼう」ロボットアームの遠隔操作デモンストレーションを実施
- 12月6日に実施したデモンストレーションの内容や結果を掲載しています。
- 「きぼう」ロボットアーム
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |