This is an archive of information released in the past.
Disclaimer: It may contain broken links or outdated information. Some parts may not function in current web browsers.
*Visit https://humans-in-space.jaxa.jp/en/ for the latest information.

Mission
Flight Day 4
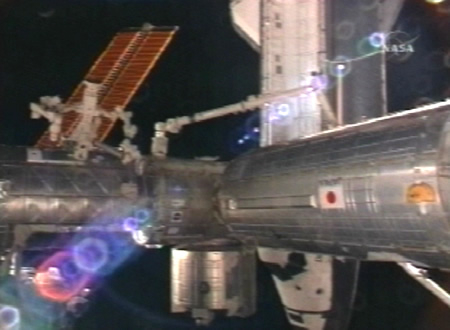
Pressurized Module (PM) installing on the ISS (Image credit: NASA)
Today, Kibo's Pressurized Module (PM) was installed on the ISS at 8:42 a.m.
The PM is the Kibo's main pressurized module. This installation of the PM has set the stage for Kibo's full-fledged operations and future research activities.
The mission's first spacewalk (EVA#1) began at 1:22 a.m. today, and it lasted 6 hours and 48 minutes. Just before the beginning of the EVA#1, one of the EVA crews' communication headset got some problem. The start time of the EVA#1 was delayed 50 minutes for changing out the failed communication headset. However, once the spacewalk was started, two spacewalkers got their tasks so efficiently that the all the tasks planned on EVA#1 plus some get-ahead tasks were completed.
After the EVA crew prepared the PM for its installation, Hoshide manipulated the station's robotic arm (Space Station Remote Manipulator System: SSRMS) and grappled the PM in the shuttle's payload bay. The PM was removed from the payload bay at 5:49 a.m.
The PM was slowly moved and attached to the berthing mechanism (Common Berthing Mechanism: CBM) at the port side of Harmony (Node2). Thereafter, the crew checked the Harmony/PM berthing port to see if there is any leak on it, and the crew confirmed that the PM was properly berthed.
The PM will remain grappled by the SSRMS to receive power for heating until A-string activation of the PM on flight day 6.
Tomorrow, the vestibule between Harmony and the PM will be outfitted and the series of B-sting activations will be performed by crew and the flight control team at TKSC. Then, Hoshide and some other crewmembers will enter the PM.
Hoshide's activities on FD4
Today's Hoshide's activities focused mostly on the robotic operations. During the EVA#1, Hoshide manipulated the SSRMS, and grappled and handed over the OBSS to the SRMS. Hoshide also removed the PM from the shuttle's payload bay and attached to the port side of Harmony. He called to the ground shortly after the PM was attached to the Harmony and commented;
"Congratulations especially to Tsukuba. We have a new HOPE on the International Space Station."
Hoshide is the first Japanese astronaut who operated the station's robotic arm.
For more information, please log on to NASA STS-124 Status Report.
*All times are Japan Standard Time (JST)
| Copyright 2007 Japan Aerospace Exploration Agency | Site Policy |