このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


「きぼう」ロボットアーム
「きぼう」日本実験棟のロボットアームは、「きぼう」の実験装置や搭載機器の交換作業、各種実験支援、または保守・保全作業支援に使用される宇宙での実用ロボットです。ロボットアームは「親アーム」と「子アーム」で構成されますが、1J(STS-124)ミッションでは、そのうち「親アーム」が打ち上げられます。
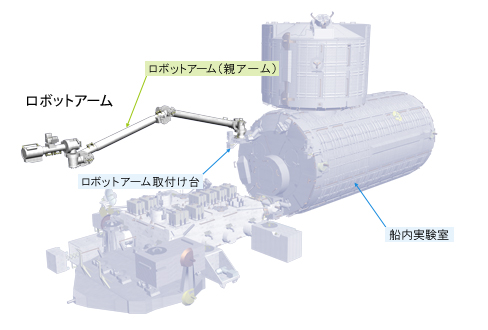
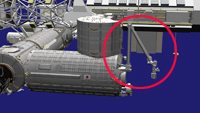
「きぼう」日本実験棟とロボットアーム

船内実験室に固定された状態のロボットアーム(提供:NASA)
ロボットアームは、「きぼう」船内実験室の外側にあるロボットアーム取付け台にあらかじめ取り付けられ、固定された状態で打ち上げられます。
- 「きぼう」ロボットアーム
- ロボットアームの概要や主要諸元について
ロボットアームの構成
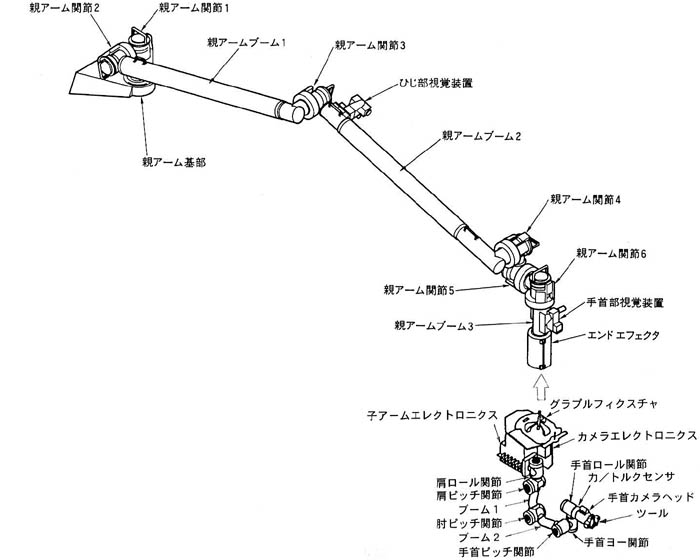
ロボットアーム外観
ロボットアームは、「親アーム」と、その先端に取り付けられる「子アーム」で構成されており、それぞれのアームには6個の関節があります。本体の「親アーム」は、船外実験装置など大型機器の交換に使用し、先端の「子アーム」は、細かい作業を行うときに使用します。
ロボットアームの操作は、宇宙飛行士がロボットアーム操作卓を使って行います。ロボットアーム操作卓は、船内実験室内に設置されるロボットアーム制御ラックに搭載されています。親アームに取り付けられたテレビカメラにより、船内実験室内から作業の様子を確認することができます。
ロボットアーム
ロボットアーム操作卓(ロボットアーム制御ラック)
ロボットアームの起動/展開/動作試験
ロボットアームの軌道上での保存姿勢(イメージ)
まず、飛行5日目に、ロボットアーム操作卓が搭載されたロボットアーム制御ラックが船内実験室に運ばれ、飛行6日目に制御ラックの起動が行われます。
ロボットアームの起動は、飛行6日目と飛行7日目に行われます。その後、ロボットアームは部分的に展開され、飛行10日目に完全展開された後、収納姿勢である「保存姿勢」へ移行されます。また、飛行10日目には、ロボットアームの各関節のブレーキの利きを確認する、ブレーキ試験を実施します。
ロボットアーム操作卓の組立て、ロボットアームの起動、展開、ブレーキ試験などのロボットアームに関する一連の作業は、主に星出宇宙飛行士が担当します。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |