このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


「きぼう」ロボットアームが「第4回ロボット大賞」にて優秀賞および日本科学未来館館長賞を受賞しました!
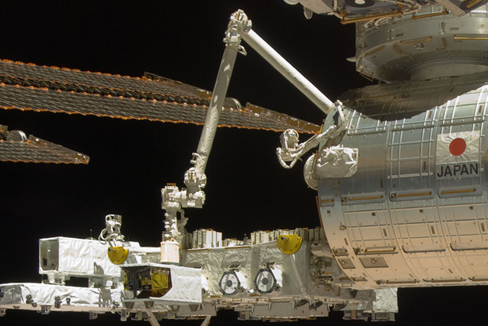
「きぼう」ロボットアーム(出典:JAXA/NASA)
このたび、宇宙航空研究開発機構(JAXA)とNEC(日本電気株式会社)は、「きぼう」日本実験棟に取り付けている宇宙用遠隔操作ロボット「ロボットアーム」(親アーム)を、経済産業省/社団法人日本機械工業連合会が主催する「第4回ロボット大賞」に共同応募し、公共・フロンティアロボット部門「優秀賞」と「日本科学未来館館長賞」を受賞いたしました。

ロボットアームは、「きぼう」船外実験プラットフォーム上の実験装置や搭載機器の交換作業、各種実験支援または保守・保全作業の支援という役割を担っています。
- 「きぼう」ロボットアーム
- 役割や構成、諸元など
今回の受賞では、厳しい環境下でもある宇宙空間で、STS-127(2J/A)ミッションおよび宇宙ステーション補給機「こうのとり」1号機(HTV1)のフライトにおいて、合計5台の実験用機材移設に成功し、幅広い要素技術が統合されたロボット技術が高く評価されました。
今回の受賞をさらなる糧とし、今後も技術水準を向上させ、宇宙開発をリードする技術・人材を育成することにより、「きぼう」日本実験棟の着実な運用を推進していきたいと思っています。
応募対象名:
宇宙用遠隔操作ロボット「ロボットアーム」(親アーム)
第4回ロボット対象審査委員による評価コメント:
宇宙空間という特殊な環境ながらも、有人宇宙ステーションの一部として安全で確実な運用をできる点が評価された。また、今回の応募期間中に計5台の実験用機材の取り付けを完了し、わが国の技術力を海外に示した実績も評価され、「日本科学未来館館長賞」の受賞となった。
ロボット大賞とは:
ロボット技術(RT)は、情報技術、エレクトロニクス、機械工学、素材技術などの幅広い要素技術を統合することで生み出されます。
世界に誇る日本のロボット技術の優位性を活かしつつ、次世代のロボット産業を育成することは、我が国が科学技術立国として更に発展するとともに、その実用化が進むことで、急速な少子高齢化による労働力不足の解消や、安全・安心な社会の実現に貢献するものと期待されております。
日本国内で活躍し、かつ、将来の市場創出への貢献度や期待度が高いと考えられるロボットまたは部品・ソフトウェアを表彰することにより、ロボット技術の開発と事業化を促進し、技術革新と用途拡大を加速するとともに、社会に役立つロボットに対する認知度を高め、ロボットの需要を喚起することを目指します。
「第4回 ロボット大賞」は、ロボットまたは部品・ソフトウェアを対象に、4部門(サービスロボット部門、産業用ロボット部門、公共・フロンティアロボット部門、部品・ソフトウェア部門)、6つの表彰位を設けています。
主催:経済産業省、社団法人 日本機械工業連合会
協賛:財団法人 機械振興協会
協力:独立行政法人 中小企業基盤整備機構、日本科学未来館、社団法人 日本ロボット工業会、社団法人 日本ロボット学会、社団法人 日本機械学会、社団法人 人工知能学会、日本人間工学会
◆第4回ロボット大賞ウェブサイト
http://www.robotaward.jp/
なお、11月26日(金)に日本科学未来館(東京都江東区)で第4回ロボット大賞表彰式が、11月26日(金)~28日(日)にかけては、展示会(一般公開)、シンポジウム、ワークショップが同館で開催されました。

表彰式の様子
記念品と表彰状を手にする関係者(左から松村技術領域リーダ、桑尾氏(NEC)、土井主任開発員)
受賞に関する関係者の声
土井 忍(宇宙航空研究開発機構 JEM運用技術センター 主任開発員)

「きぼう」ロボットアームは、日本初の“実用”宇宙ロボットアームであり、それ自体は実験のための支援ツールですが、これを使って船外に取り付けた観測装置などが成果を挙げたという話を聞くたび、その任務を果たしたことを実感していました。この度のロボット大賞において、「ロボットアーム」そのものの開発・運用成果が評価され、関係者一同、非常に感激しております。蓄積した「きぼう」ロボットアームの開発・運用技術が、今後の宇宙ロボット技術発展の礎となることを期待しています。
桑尾 文博(日本電気株式会社 JEMプロジェクトマネージャ)

ロボットコミュニティの方々から「きぼう」のロボットアームの成果を評価戴き、また、日本科学未来館 館長賞を受賞でき、長期間開発に携わってきたチームの一員として大変感激しています。今後更に地上ロボットと宇宙ロボットの技術交流が活発になり、宇宙ロボットの世界が広がって行くことを期待してます。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |