| 第2回「きぼう」日本実験棟のロボットアーム操作性評価試験 |
|

試験の様子 | 国際宇宙ステーション(ISS)の「きぼう」日本実験棟で使用するロボットアームの第2回操作性評価試験が筑波宇宙センターで5月21日から6月1日まで行われています。
ここでは若田宇宙飛行士が試験を行った5月23日のもようについてお知らせします。
 | 「きぼう」日本実験棟ロボットアーム操作性評価試験とは |
操作性評価試験(Human In the Loop(HIL)試験)とは、ロボットアームの操作性を実際に宇宙飛行士が確認/評価する試験です。2000年3月には土井宇宙飛行士など5人の宇宙飛行士が参加して親アームおよびコンソールの操作性評価試験(HIL試験#1)を実施し、データ表示などの改善点が見つかりましたが、総合的には宇宙飛行士から高い評価を得ました。
| 第2回「きぼう」日本実験棟ロボットアーム操作性評価試験内容 |

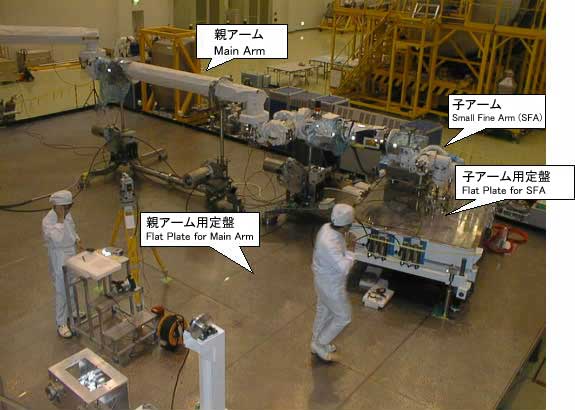
親/子アーム組み合わせ試験の状況 | 今回は、HIL試験#1でできなかった子アームのフライト品を使用した総合的な子アームの操作性について評価試験を行っています。具体的には右の「親/子アーム組み合わせ試験の状況」に示すように広い定盤上に親アームと子アームを結合して設置した状態で軌道上での典型的な子アームの運用手順を実行することにより、指令送信の操作性、データ表示の視認性などから、子アームの応答性能まで幅広く評価しています。
期間は5/21~6/1の2週間で、参加する宇宙飛行士は、土井隆雄飛行士、若田光一飛行士、Garett Reiseman飛行士、Steve Swanson飛行士です。
-
 コンソールを操作する若田宇宙飛行士
コンソールを操作する若田宇宙飛行士 | 
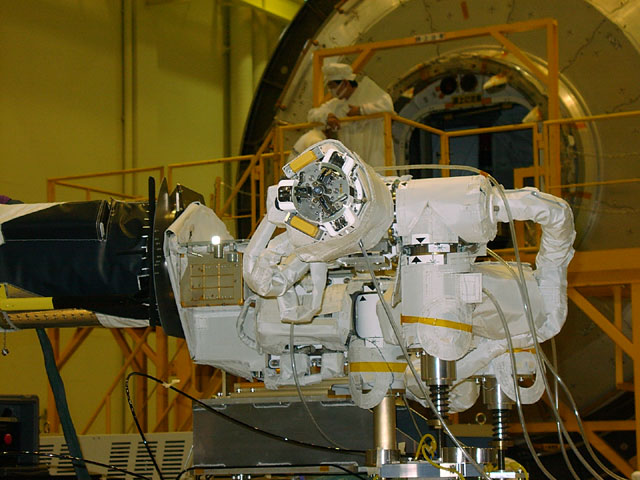
子アーム
|
| 若田宇宙飛行士のコメント |
 |  |
| 記者の質問に答える若田宇宙飛行士 |
若田宇宙飛行士は日本のロボットアームについて以下のようなコメントを述べました。
「きぼう」日本実験棟に取り付けられるロボットアームは親アームと子アームの2つがあり、スペースシャトルのロボットアームにはなかった、新しい機能も多く、宇宙飛行士にとってとても使いやすい設計になっています。
1997年にスペースシャトル上で実験を行ったマニピュレータ飛行実証試験(MFD)のロボットアームや、1998年から1999年にかけて軌道上で実験を行った人工衛星「おりひめ・ひこぼし」に搭載されたロボットアームの技術や運用経験が、この「きぼう」のロボットアームの設計にも反映されており、日本の宇宙ロボットの技術が着実に進歩してきている事を実感します。今回操作性を評価した「きぼう」のロボットアームも今の状態で宇宙に持っていっても問題無いと思われるほど順調に開発が進んでいます。
| 今後の予定 |
この操作性評価試験(HIL#2)のあと、ロボットアームの他のシステム試験を6月中に行い、7~8月にかけては様々な要求仕様に対して確実に検証されたかどうかを確認する審査会を実施した上で、2001年10月から2002年4月まで「きぼう」全体のシステム試験を実施します。その後地上運用設備や実験ペイロードとの適合性試験を経た上で、2003年頃には最初に打ち上げられるコンソールがケネディ宇宙センターに輸送される予定です。(親アーム/子アームはそれぞれの打上げスケジュールに応じて順次ケネディ宇宙センターに輸送されていく予定です。)
最終更新日:2002年10月31日
|