このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。

ロシアの小型研究モジュール1(MRM1)
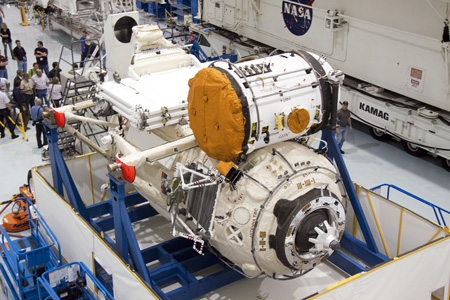
NASAケネディ宇宙センター(KSC)にて整備されるMRM1(提供:NASA/Gianni Woods)
ロシアの小型研究モジュール1(Mini-Research Module 1: MRM1)は、国際宇宙ステーション(ISS)の「ザーリャ」(基本機能モジュール)下部に結合され、ISSの保管スペースとして使用されるとともに、ロシアのソユーズ宇宙船とプログレス補給船のドッキングポート(※)として使用されます。ロシアのISSモジュールとしては、初めてスペースシャトルで輸送されます。
※STS-133(ULF5)ミッション(2010年9月予定)で、「レオナルド」(多目的補給モジュール1)を改修した恒久型多目的モジュール(Permanent Multipurpose Module: PMM)が「ユニティ」(第1結合部)に結合される予定です。PMMが結合されると、クリアランスの問題からザーリャ下部のドッキングポートへの宇宙機のドッキング運用が難しくなるため、十分なクリアランスを確保するためにMRM1が設置されます。
| 項目 | 値 |
|---|---|
| 寸法 | 約2.35m(直径)×約7m(長さ) |
| 質量 | 構造重量:5,075kg 打上げ時:8,015kg |
| 容積 | 与圧容積:17.4m3 居住可能容積:5.85m3 |
MRM1の搭載品
MRM1の外部
2012年頃にロシアが打ち上げる予定の多目的研究モジュール(Multipurpose Laboratory Module: MLM)の予備品と装備品を、MRM1の外部に取り付けて打ち上げます。
【動画】MRM1外部の搭載品のイメージ(提供:NASA)
欧州ロボットアーム(ERA)の予備品

試験中のERA(提供:ESA)
欧州ロボットアーム(European Robotic Arm: ERA)の予備品が搭載されます。ERAは、ロシアセグメント側の組立て・メンテナンス作業に使用するために欧州宇宙機関(ESA)が開発したロボットアームです。将来的にはロシアのMLMのエアロックから小型の船外ペイロードを船外/船内に出し入れする作業などでも使用されます。また、船外活動クルーを作業場所まで移動させるための足場にもなります。
エアロック

MRM1に搭載されたエアロック(提供:NASA/Dimitri Gerondidaikis)
「きぼう」日本実験棟のエアロックと同様に、船外の実験装置やシステム機器を船外/船内に出し入れするためのエアロックです。MLM到着後にMRM1からMLMに移設されます。
ラジエータ
折りたたまれた状態で打ち上げられ、MLM到着後にMLMに取り付けられ、展開されます。
船外活動クルー用のプラットフォーム(PWP)
ERAの起動や点検、運用時に船外活動クルーの作業場所として使用されるプラットフォーム(Portable Work Post: PWP)です。

MLMの運用イメージ(提供:ESA - D.Ducros)
MRM1の内部
MRM1内部には、食料や物資輸送用バッグ、交換部品、実験機器類、医療用補給品など、1,392kgのロシアと米国の補給物資が搭載されて打ち上げられます。米国の物資を運搬することを条件として、MRM1はスペースシャトルで打ち上げられることになりました。
MRM1の打上げから取付け、入室までの運用
飛行1日目、スペースシャトルが軌道に投入され、ペイロードベイ(貨物室)ドアを開いた後にMRM1は起動されます。ペイロードベイ(貨物室)に搭載されている間は、スペースシャトルから電力とデータのインタフェースがMRM1に提供されます。
飛行5日目、ISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)により、ザーリャに取り付けられます。ペイロードベイ(貨物室)からMRM1を取り出した後は、SSRMS経由で電力とデータのインタフェースが提供されます。なお、MRM1の取付けにおいて、初めてキューポラのロボットアーム操作卓からSSRMSの操作が行われます。
MRM1のハッチ開放/入室は、飛行7日目に予定されています。
【動画】MRM1の取付けイメージ(提供:NASA)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |