

実施日:飛行11日目
担当:スティーブ・ボーエン、ロバート・キンブロー両宇宙飛行士
このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


実施日:飛行11日目
担当:スティーブ・ボーエン、ロバート・キンブロー両宇宙飛行士
左舷側の太陽電池パドル回転機構(Solar Alpha Rotary Joint: SARJ)のレースリングの潤滑を行います。左舷側のSARJには問題は生じていませんが、右舷側SARJの不具合を受けて、金属磨耗を予防するために実施されます。
手順としては、SARJの多層断熱材(Multi-Layered Insulation: MLI)カバー6枚を取り外し、レースリングの半分を潤滑します。その後、地上からのコマンドでSARJを180度回転させて、残りの半分を潤滑できるようにします。残りの半分を潤滑した後、外したMLIカバーを元の位置に戻します。
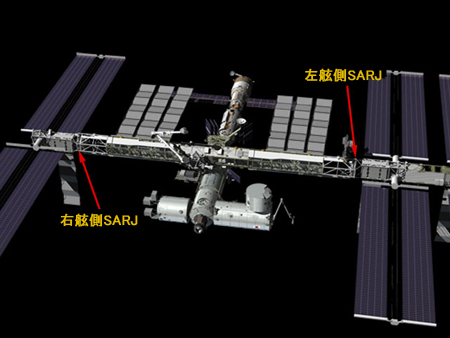
左舷側太陽電池パドル回転機構(SARJ)の位置
※このほか、第1回、第2回、第3回船外活動に引き続き、右舷側SARJ関連の残りの作業も行われ、SARJの修復作業は完了しました。
船内からのコマンドによる収納ができなくなっていた、船外実験プラットフォーム結合機構(Exposed Facility Berthing Mechanism: EFBM)を構造的に結合するための伸展ボルト1本を、手動で収納します。
※飛行8日目に行ったEFBMの点検時に、船外実験プラットフォームを構造的に結合するための伸展ボルト4本のうち1本が収納されなかったため、この作業が追加されました。

EFBMのMLIカバー
飛行8日目に点検を終えた船外実験プラットフォーム結合機構(EFBM)に再度、多層断熱材(MLI)カバーを取り付けます。第1回船外活動で取り外した5枚のMLIカバーのうち、中央の大きなカバー1枚のみを取り付けます。
※以下のふたつの「きぼう」関連の作業は、今回の船外活動では実施されませんでした。

「きぼう」ロボットアームの突出した接地用配線
1J(STS-124)ミッションで「きぼう」ロボットアームに関する船外活動を行った後、接地用の配線2本が突出して、「きぼう」ロボットアームのカメラ映像に映りこんでいました。この突出部分を倒して固定し、カメラ視野に入らないようにします。
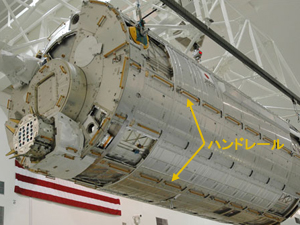
「きぼう」船内実験室のハンドレール
「きぼう」船内実験室の外壁へ、ハンドレールを3本取り付けます。ハンドレールは、船外活動で作業を行う際に、船外活動クルーがつかまったり、身体をテザーで固定するための手すりです。

STS-116ミッションでのETVCGの取付け
P1トラスの下部に、外部TVカメラ(External TV Camera Group: ETVCG)1台を設置します。2009年の宇宙ステーション補給機(H-II Transfer Vehicle: HTV)技術実証機(初号機)の到着時に、国際宇宙ステーション(ISS)のロボットアーム(Space Station Remote Manipulator System: SSRMS)でHTVを把持しますが、SSRMS担当クルーは、このカメラのビデオ映像で、HTVを確認します。

GPSアンテナ(STS-110ミッション)
船内保管室の上部に、HTV近傍通信システム(Proximity Communication System: PROX)用のGPSアンテナ2基を設置します。これも、2009年のHTV初号機の到着に備えた作業です。
※当初2基の設置予定でしたが、船外活動作業時間の制約のため、もう1基の取付けは中止されました。
赤外線カメラと通常の船外活動用のカメラを使用して、P1トラスおよびS1トラスのラジエータの撮影を行います。また、モービルトランスポータ(台車:MT)のアンビリカルケーブルであるTrailing Umbilical System(TUS)ケーブルについても、時間があれば、異常がないか確認するために撮影を行います。
現在、右舷側のラジエータパネル1枚に損傷が確認されているため、状況の確認と今後の対応を検討するために、写真撮影を行うものです。
※この作業は、第2回船外活動で実施されました。
(写真、画像は全てNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |