|
飛行14日目の12月3日、午後6時9分(日本時間、以下同様)より土井宇宙飛行士はスコット宇宙飛行士とともに約5時間にわたるSTS-87ミッションでの第2回目の船外活動を行いました。
当初このSTS-87ミッションでは、船外活動は1回しか予定されていませんでした。しかし、スパルタン衛星の回収により当初予定されていた国際宇宙ステーション建設時に使用するクレーン等の機器の検証作業が一部しか実施できず、NASAはステーション建設向けてクレーンの操作性等に関するデータを収集しリスクを低減させるという観点から、第2回目の船外活動を実施することを決定しました。
第2回目の船外活動では、第1回目の船外活動のときに明らかになったクレーンに係る問題点を明確にすることが目的で、小型ORU(Orbital Replacement
Unit: 軌道上交換ユニット)のクレーンへ4つの方法で取り付ける検証実験等を行いました。また国際宇宙ステーション組立の際の船外活動をモニタするための自律型船外ロボットカメラ「スプリント」のテストを行いました。
- 開始日時 12月3日午後6時9分(12月3日午前3時9分 CST)
- 終了日時 12月3日午後11時9分(12月3日午前8時9分 CST)
- 船外活動実施時間 5時間
第2回EVA作業内容のタイムライン(実績)
経過
時間 | EV1(スコットMS)の作業内容 | EV2(土井MS)の作業内容 |
| 0:00 | エアロックより船外へ |
| 0:24 | EVAクレーンの設置 | | 0:48 | EVAツールの準備 | EVAクレーンの操作準備 |
| 1:09 | EVAクレーンを使った小型ORUの操作を行う。
- EVAクレーン先端への小型ORUの取付
- EVAクレーングリッド上における小型ORUの操作
- ORUテザーへの小型ORU取付
| | 2:27 | EVAクレーンの収納 |
| 2:47 | AERCam/スプリント(自律型船外ロボットカメラ)の放出、回収 | 宇宙飛行士身体固定用テザー(BRT)/パワーツールの評価を行う。 |
| 4:18 | EVAツールの収納 | | 4:41 | エアロックに戻る |
| 4:59 | エアロック再加圧、船外活動終了 |
| ORU | : | Orbital
Replacement unit:軌道上交換ユニット | | EVA | : | ExtraVehicular
Activity:船外活動 | | MS | : | Mission
Specialist:ミッションスペシャリスト | | BRT | : | Body
Restraint Tether:宇宙飛行士身体固定用テザー | | CST | : | Central
Standard Time:米国中部標準時間 | |  |
EVAクレーンの
操作準備をする
土井MS |
|  |
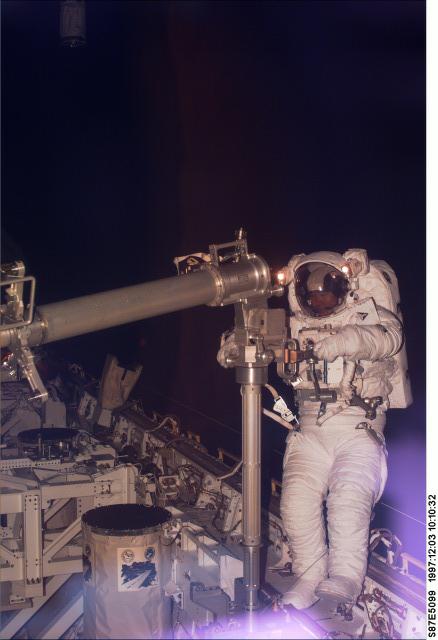
スプリントを放出する
スコットMS |
|  |
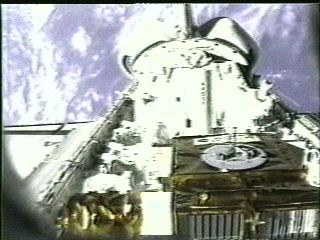
| ペイロードベイ(貨物室)に浮かぶスプリント |
|  |
| スプリントが撮した映像 | |