このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


- 新着情報
- きぼう利用戦略
- 「きぼう」を使ってみたい方へ
- 利用の計画
- 様々な利用とテーマの一覧
- 利用テーマの解説
- 実験装置
- 「きぼう」打ち上げ以前の実験
- 各種委員会
- きぼうアジア利用推進室(KUOA)
- 関連リンク
「きぼう」やセミナーの最新情報、テーマ募集開始などをいち早くご案内します。
| 研究者向け | 一般向け |
ポート共有実験装置(MCE)ミッション EVA支援ロボット実証実験(REX-J)の動作確認状況について
宇宙航空研究開発機構は、平成24年8月20日~8月31日の期間、「きぼう」日本実験棟船外実験プラットフォームで実施したポート共有実験装置(MCE)ミッションの一つである「EVA支援ロボット実証実験(REX-J)」(*1)において、ロボットの基本機能(*2)が軌道上で正常に動作することを確認しました。
今後、10月中旬より平成25年3月までの約6ヶ月間、テザー制御によるロボット移動技術に必要な要素技術の実験を実施する予定です。
(*1)REX-Jは、宇宙飛行士の船外活動(EVA)を支援・代行するロボットの実現を目指し、同ロボットを実現する上で不可欠な「空間移動技術」の要素技術の実証実験をするミッションで、伸展式ロボットアームとテザーを利用したロボットの移動実験を行います。REX-Jは、平成24年7月21日(日本標準時)に種子島宇宙センターから「こうのとり」3号機/H-IIBロケット3号機によって打ち上げられました。
(*2)小型カメラによる画像取得、伸展式ロボットアームの伸展・収縮動作、ハンド開閉及び手首関節動作、ロボット本体上段部の回転動作、マクロコマンド機能の確認を行いました。
本情報の詳細につきましては、REX-J特設サイトでご覧いただけます。
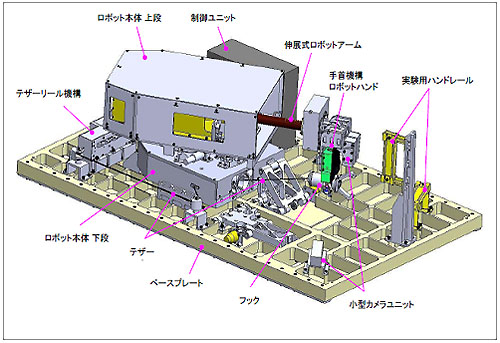
ポート共有実験装置(MCE)とREX-Jロボット実験装置
【ロボットハンド動作の様子】
width="387" height="175" />
【伸展式ロボットアーム動作の様子】
width="420" height="170" />
【手首関節動作の様子】
 width="510" height="155" />
width="510" height="155" />(画像の出典は全てJAXA)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |