|
||||||

シャトル技術シミュレータ 米国テキサス州のヒューストンにあるNASAジョンソン宇宙センターで行われている宇宙飛行士の訓練は、コンピュータグラフィックス(CG)を使用したシミュレータ訓練設備を有効に使っていることが特徴の1つです。それらの訓練設備の中でもシャトル技術シミュレータ(SES:Shuttle Engineering Simulator)は、VRラボと並んでCGを有効に利用した代表的なシミュレータ設備と言えます。 SESは、乗組員がスペースシャトルから見ることができる情報をCG化して訓練に応用するシミュレータで、ジョンソン宇宙センターにはSES FWD(Forward Station)、SES AFT(Aft Station)、SES DOME(Dome Station) の3種類があり、訓練目的によってそれぞれを使い分けています。 SES FWDは、スペースシャトルの前部側から、SES AFTは後部側から乗組員が見ることができる情報をCG化して訓練に応用しています。いろいろな状況がCGとしてプログラミングしてあり、SES FWDはパイロットやコマンダーの着陸時の操縦訓練などに、SES AFTはロボットアームを使ったペイロードの放出や回収訓練、ランデブー、ドッキング、船外活動支援作業の訓練などに使用されています。 SES DOMEは半球ドーム型の大型画面にCGを投影しているシミュレータです。スペースシャトルの後部から乗組員が見ることのできる情報を投影し、SES AFTと同様の訓練を行うことができますが、半球ドームであるため視覚的にもより現実に近いとともに、SES AFTに使われているプログラムより忠実度は高くなっています。 シミュレータを有効に使う SESのようなシミュレータの利点は、何と言っても時間の節約になることでしょう。無重量環境訓練施設(NBL)やロボットアームの実寸大訓練装置(MDF)の訓練は、実寸大のモックアップを扱って訓練を行うので、訓練者が実際の大きさや長さを視認し実感できる、という利点がありますが、モックアップを準備したり、後片づけをしたりといった、宇宙飛行士をサポートする人たちの負担が人数的にも時間的にも大きくなるというデメリットがあります。その点SESのようなコンピュータによって制御されたシミュレータは、あらかじめプログラミングさえしておけばそのプログラムを呼び出すだけで容易に訓練が可能になりますし、ある手順の途中からでも訓練を開始することができるので、150人以上の宇宙飛行士を抱えるNASAのような組織ではとても有効に使用されています。 PMA-3の取り扱い訓練
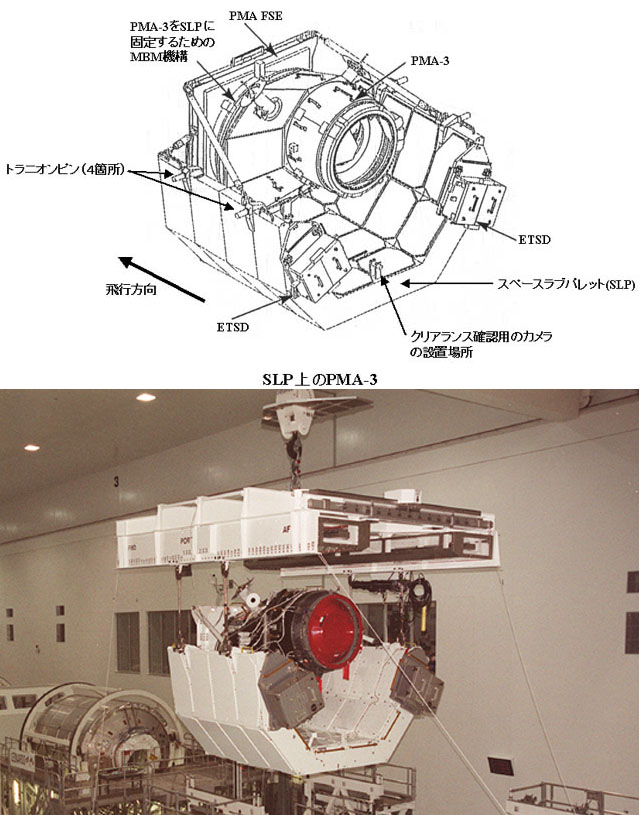
PMA-3はSTS-92でISS本体に取り付けられる構造体で、打上げ時、スペースラブ・パレット(SLP)と呼ばれる台座に固定されて打ち上げられます。軌道上では船外活動作業者がPMA-3とSLPを固定している手動結合機構(MBM:Manual Berthing Mechanism)のボルトと把持ラッチを緩めた後、若田宇宙飛行士が操縦するロボットアームでSLPからPMA-3を取り出し、ISS本体に取り付けます。 PMA-3に関するロボットアームの操作手順は、SLPから取り出す時、PMA-3とのクリアランスがたいへん小さいことや、ISS本体までPMA-3をロボットアームで運ぶ時には、ロボットアームの特異点(singularity)(*)に近いところで運用しなければならないことなどから、ロボットアーム操縦者にとっては大変難しい操作であるとともに、大変興味深い操作であるとも言えます。 この日若田宇宙飛行士は、PMA-3の操作時、スペースシャトルの窓からの視界、テレビカメラの映像が実際どのように見えるかを確認しながら、PMA-3のSLPからの取り出しからISS本体への締結までの一連のロボットアーム作業を通して実施し、インストラクタとともにクリアランスや、ロボットアームの関節の動きや位置・姿勢を確認しました。 このような訓練は、訓練設備を変えて毎日のように行われます。 *特異点:ロボットアームをまっすぐに延ばした状態など、ロボットアームの座標を計算した解が複数存在する点。 最終更新日:2000年 9月12日
|