|
||||||

ロボットアームの訓練
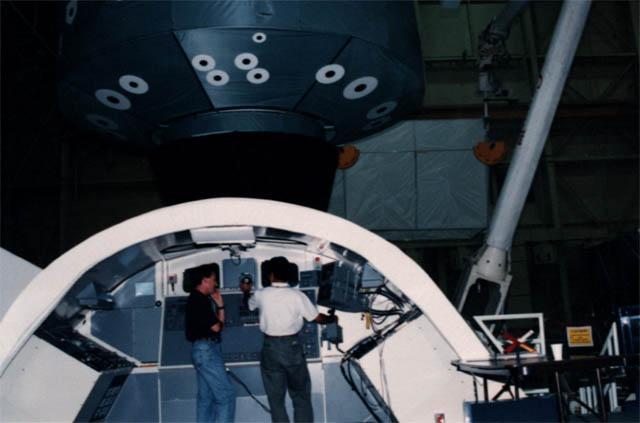
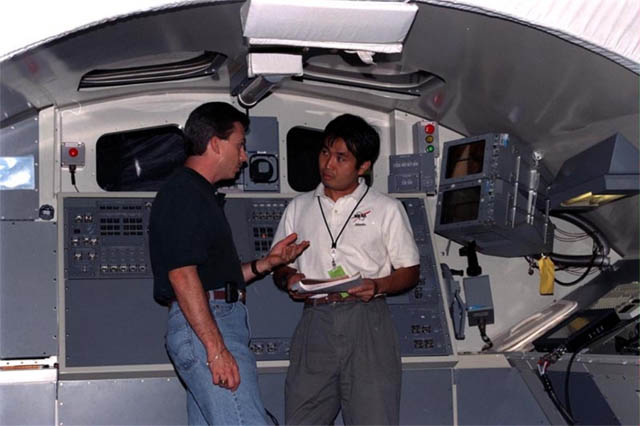
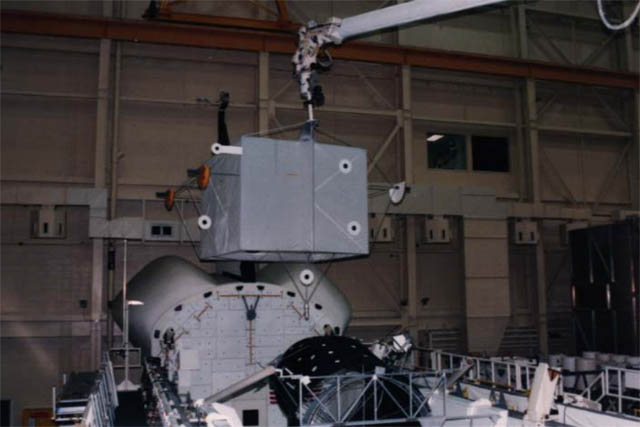
STS-92ミッションで、若田宇宙飛行士にはたくさんの任務があることは前回の訓練レポートでお伝えしました。ミッション中は、若田宇宙飛行士は特にロボットアーム操作の主担当になっているので、他の乗組員を交えての統合シミュレーション訓練の他にも、多くの時間をロボットアームの訓練に費やしています。先日はMDF(Manipulator Development Facility)という訓練設備で、軌道上での実作業を想定した模擬訓練を行いました。 MDFは実物大のスペースシャトルの後方フライトデッキやペイロードベイ(貨物室)、ロボットアーム等を模擬した訓練設備で、主にロボットアームの操作手順やハードウェア、ソフトウェアシステムの開発・検証を行うことを目的としています。MDFでは、ロボットアームが実機と同様ペイロードベイの左舷に装着されており、スペースシャトルの後部デッキを模擬したコントロール室から操作ができるようになっています。 写真「MDFのシャトル後方デッキでアーム操縦訓練を行う若田宇宙飛行士」の後方に見える大きなモックアップ(実物大の模型)はユニティーの愛称で呼ばれる宇宙ステーション拡張のための結合基幹部です。STS-92で若田宇宙飛行士は、PMA-3(Pressurized Mating Adapter-3)とZ1トラスという構成パーツをロボットアームでユニティーに締結するという大変重要なタスクの主担当になっています。この日若田宇宙飛行士はロボットアームの操作訓練を行うと共に、ロボットアーム担当インストラクタと締結作業に最も適したロボットアームの軌跡や位置・姿勢の確認をしたり、ロボットアームとユニティーの間のクリアランスを視認したりという作業を行いました。MDFはコンピュータグラフィックスを使用した訓練シミュレータ設備とは異なり、実寸大のモックアップを使用した訓練設備であるため、訓練者が実際の大きさや長さを視認し実感できる、という利点があります。 若田宇宙飛行士はこのような訓練を通してロボットアームの操縦技量維持向上はもちろんですが、安全かつ効率の良いロボットアームの軌跡や位置・姿勢を決定し、それをデータ化するという大切な仕事もあります。このような訓練は打ち上げ直前まで続けられ、訓練担当チームや他の乗組員たちと検討に検討を重ねながらロボットアームの操縦技量や軌跡・位置・姿勢データの精度を向上していきます。
最終更新日:2000年 5月 10日
|