

実施日:飛行5日目
担当:スティーブン・スワンソン、リチャード・アーノルド両宇宙飛行士
このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。




実施日:飛行5日目
担当:スティーブン・スワンソン、リチャード・アーノルド両宇宙飛行士
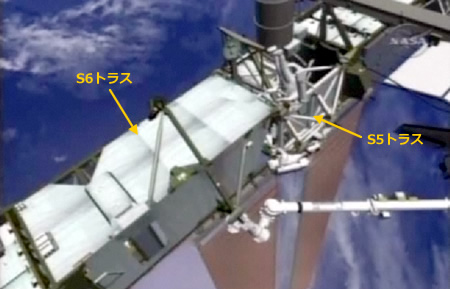
国際宇宙ステーション(ISS)のロボットアーム(Space Station Remote Manipulator System: SSRMS)でS6トラスをS5トラス先端の結合位置まで接近させる際の間隔や位置情報(※)を、船外活動クルーが目視確認し、ISS船内でSSRMSを操作するクルーに音声で伝えて誘導します。
※150cmの位置から誘導を開始し、30cm、15cm、および接触までの状況を伝えます。
S6トラスが設置された後、船外活動クルーは、S6トラスをS5トラスにボルトで結合し、S6トラスとS5トラス間の電力・データ通信ケーブルを接続します。
S6トラスとS5トラスの結合作業のイメージ
太陽電池パドル(Solar Array Wing: SAW)の展開に備え、S6トラスの太陽電池ブランケット収納箱(Solar Array Blanket Box: SABB)、ラジエータ、ベータ・ジンバル・アセンブリ(Beta Gimbal Assembly: BGA)に取り付けられている打上げ時の振動から保護するための固定機構を解除します。
BGAの固定機構を解除した後には、マストキャニスタを展開し、SABBを左右に旋回して、SAWの展開位置で固定します。
【動画】太陽電池パドル(SAW)の展開準備イメージ(STS-119ミッション)
S6トラス起動に伴い不要となる多層断熱材(Multi Layer Insulation: MLI)カバー4枚を外して、投棄します。
(特に断りの無い限り、動画、写真、画像はNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |