このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。

山崎宇宙飛行士の任務
山崎宇宙飛行士は、ロボットアームの操作と物資移送責任者(ロードマスター)を務めます。
飛行日毎に山崎宇宙飛行士が実施する主な作業については、以下のページでご覧になれます。
ロボットアームの操作

山崎宇宙飛行士は、ミッションスペシャリスト(搭乗運用技術者:MS)のステファニー・ウィルソン宇宙飛行士と協力して、スペースシャトルのロボットアーム(Shuttle Remote Manipulator System: SRMS)とISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)を操作し、以下の運用を実施します。
OBSSを使用した機体の損傷点検(飛行2日目)

SRMSとセンサ付き検査用延長ブーム(Orbiter Boom Sensor System: OBSS)を使用した機体の損傷点検を実施します。
山崎宇宙飛行士は、ディスカバリー号のノーズキャップ(先端部)と左翼部の点検を担当します。
【動画】OBSSを使用した機体の点検イメージ(提供:NASA)
OBSSの取出し(飛行3日目)
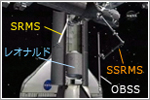
飛行4日目の「レオナルド」(多目的補給モジュール1)の取外しに備えて、レオナルドとOBSSの干渉を防ぐために、OBSSをペイロードベイ(貨物室)の収納場所から取り出します。
山崎宇宙飛行士は、ウィルソン宇宙飛行士とSSRMSの操作を担当します。
【動画】OBSSの取外しイメージ(提供:NASA)
レオナルドの取付け(飛行4日目)

レオナルドをSSRMSで把持してペイロードベイ(貨物室)から取り外し、「ハーモニー」(第2結合部)の地球側の結合機構に取り付けます。
【動画】レオナルドの取付けイメージ(提供:NASA)
レオナルドの収納(飛行11日目)

レオナルドをSSRMSで把持してハーモニーから取り外し、ペイロードベイ(貨物室)に収納します。
【動画】レオナルドの取外しイメージ(提供:NASA)
機体の後期点検(飛行12日目)
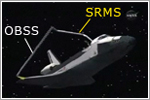
SRMSとOBSSを使用した機体の後期点検を実施します。
山崎宇宙飛行士は、ディスカバリー号のノーズキャップ(先端部)と左翼部の点検を担当します。
【動画】機体の後期点検のイメージ(提供:NASA)
ロードマスター

山崎宇宙飛行士は物資移送責任者(ロードマスター)として、物資の移送作業に関する主担当を務めます。
スペースシャトル/レオナルドとISS間の移送物資の管理や、作業の指揮を執ります。
ISSドッキング中は毎日、作業開始と終了時に地上の管制官と移送状況の確認を行います。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |