このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


新着情報
※断りのない限り、日時は日本時間です。

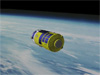
「こうのとり」3号機がSSRMSに把持されました(2012年07月27日)
7月27日午後9時23分、国際宇宙ステーション(ISS)のクルーが操作するISSのロボットアーム(SSRMS)により、宇宙ステーション補給機「こうのとり」3号機(HTV3)が把持されました。

「こうのとり」3号機、ISSの下方10mに到着(2012年07月27日)
宇宙ステーション補給機「こうのとり」3号機(HTV3)は、7月27日午後9時08分、国際宇宙ステーション(ISS)の下方10m(バーシングポイント)に到着しました。ISSに対して相対的に停止したことが確認され、「こうのとり」3号機のスラスタのエンジンが停止されました。

ロボットアームによる「こうのとり」3号機把持の模様を中継開始!(2012年07月27日)
宇宙ステーション補給機「こうのとり」3号機(HTV3)のライブ中継を開始しました。現在、「こうのとり」3号機は国際宇宙ステーション(ISS)の下方30mの地点でISSと相対的に停止しています。

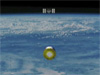
「こうのとり」3号機、ISS下方500mに到着(2012年07月27日)
「こうのとり」3号機は、7月27日午後6時47分に、ISS下方500mのRバー開始(R-bar Initiation: RI)点に到着しました。このRI点から、「こうのとり」3号機は、ランデブセンサ(Rendezvous Sensor: RVS)を用いて、1分間に1~10m程度の接近速度で少しずつ正確にISSに接近していきます。
「こうのとり」3号機、ISSへの接近を再開(2012年07月27日)
宇宙ステーション補給機「こうのとり」号機(HTV3)は、7月27日午後5時45分に、接近開始点を出発するマヌーバを完了し、国際宇宙ステーション(ISS)への接近を再開しました。
「こうのとり」3号機、ISSの後方5kmに到着(2012年07月27日)
宇宙ステーション補給機「こうのとり」3号機(HTV3)は、7月27日午後3時26分に国際宇宙ステーション(ISS)後方5kmの接近開始点に到着しました。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |