Outline of the MFD Robot Arm Mission
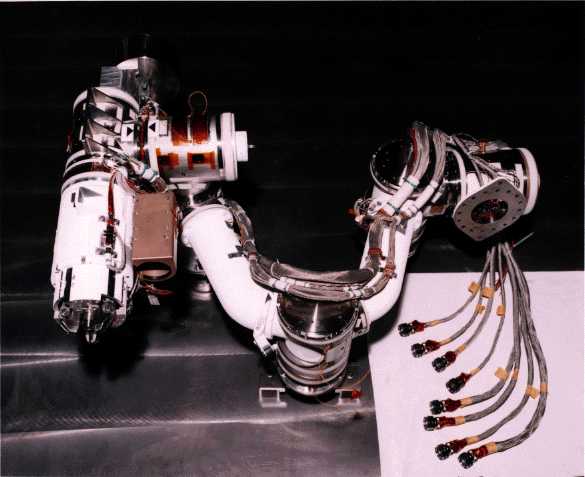
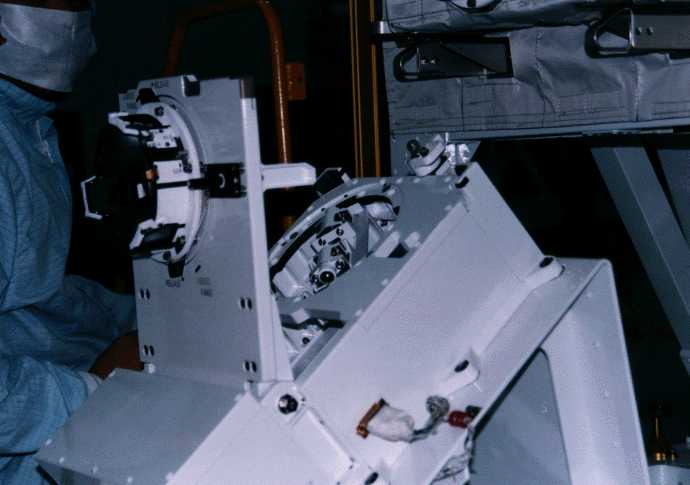
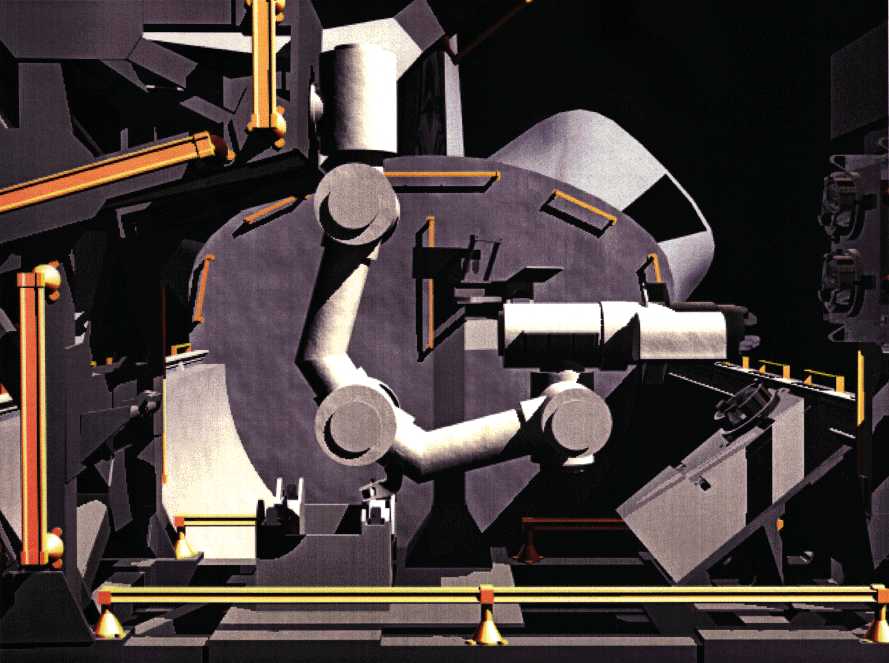
The MFD Robot Arm mission is a flight
demonstration test of the JEMRMS Small Fine Arm which is one of the most functionally
important and technically advanced components of the JEM. The objectives of the
flight demonstration test are as follows:
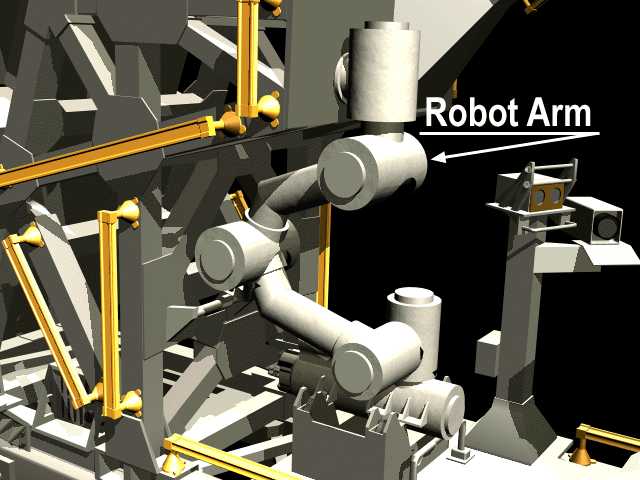
- (1) To evaluate Robot
Arm functions and performance in the weightless environment of space.
- (2)
To evaluate the human-machine interface of the Robot Arm control system.
- (3)
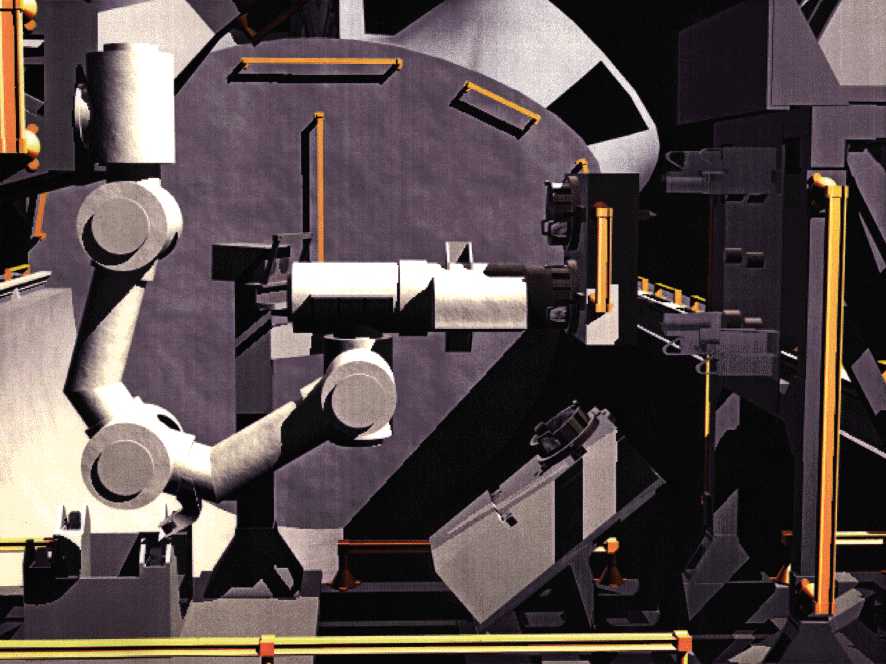
To demonstrate the attachment/detachment function of the Orbital Replacement Unit
(ORU) and the opening/closing function of the hinged door.
The
flight demonstration test of the MFD Robot Arm will be conducted as follows:
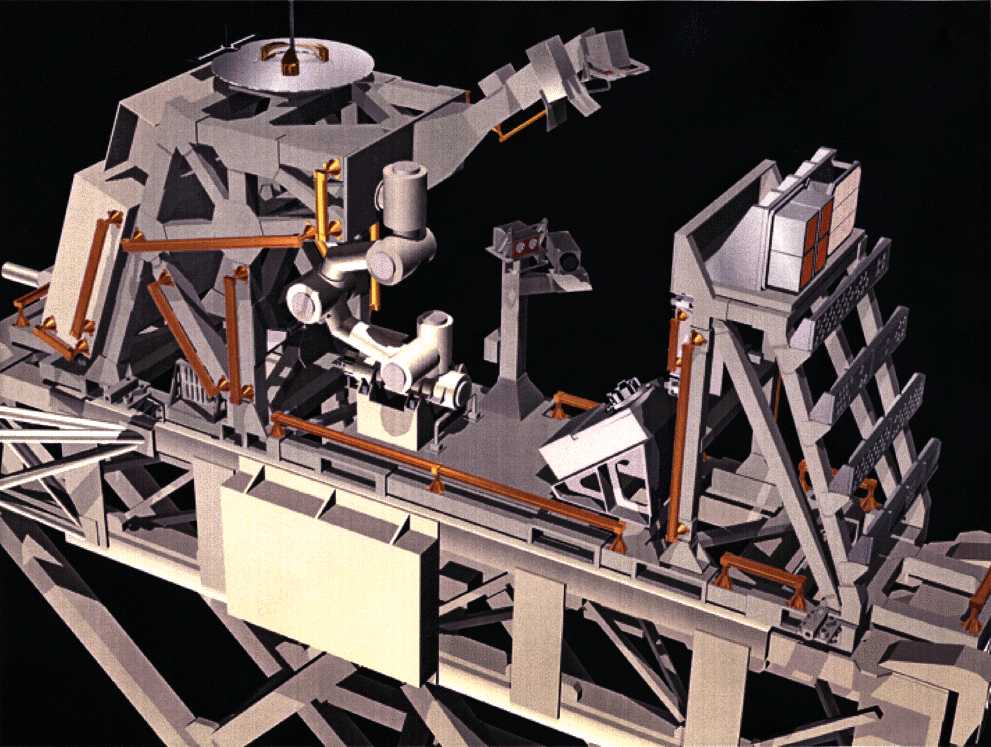
In addition to the above flight
demonstration tests of the MFD robot arm, an advanced technological experiment
to remotely control the MFD robot arm from the ground will be conducted. This
experiment is expected to contribute to the efficient operation of future space
robots aboard manned space facilities. The MFD robot arm will be operated by file
transfers from ground facilities, and the following experiments will be conducted.
- An experiment to repeat a crew-operated robot arm motion
(Crew Operated Trajectory Repetition: TEACHING)
- An experiment
to calibrate the robot arm posture using video images from the robot arm TV Camera
(Flight Calibration Experiment for Improving Space Robotics Remote Control Accuracy:
FCERA)
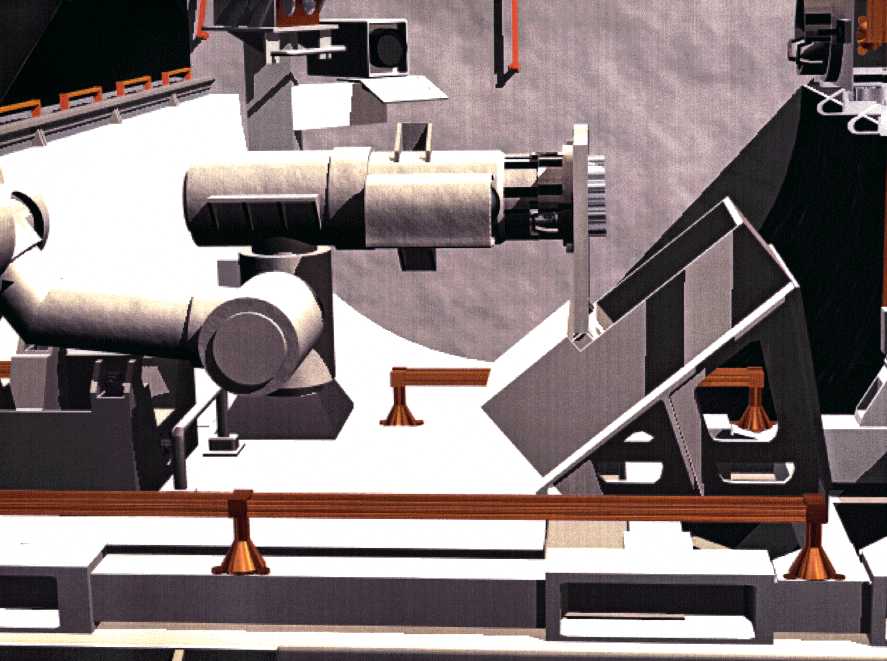
- An Experiment to remotely inspect equipment surfaces
under various lighting conditions using a TV camera on the wrist of the robot
arm (On orbit Robotics Remote Inspection Experiment: INSPECT)
- An
experiment to enhance remote control operability by constructing a virtual camera
view using video images from cameras on board the MFD payload. (Virtualized Camera
by Image Processing: VIP)
![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)