|
||||||
 |
 |
![]()
|

|
|
|---|---|---|
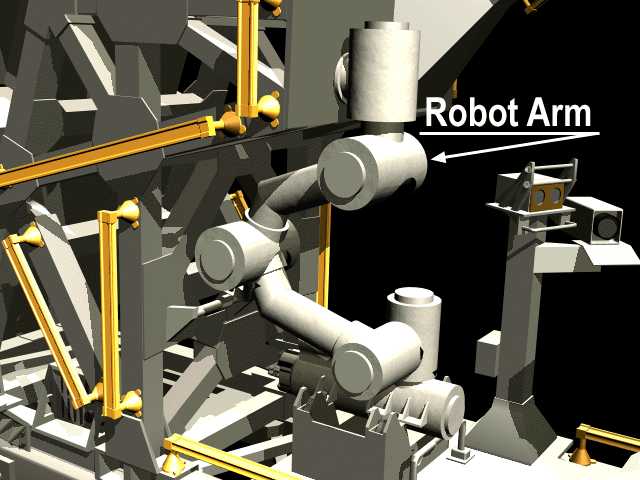
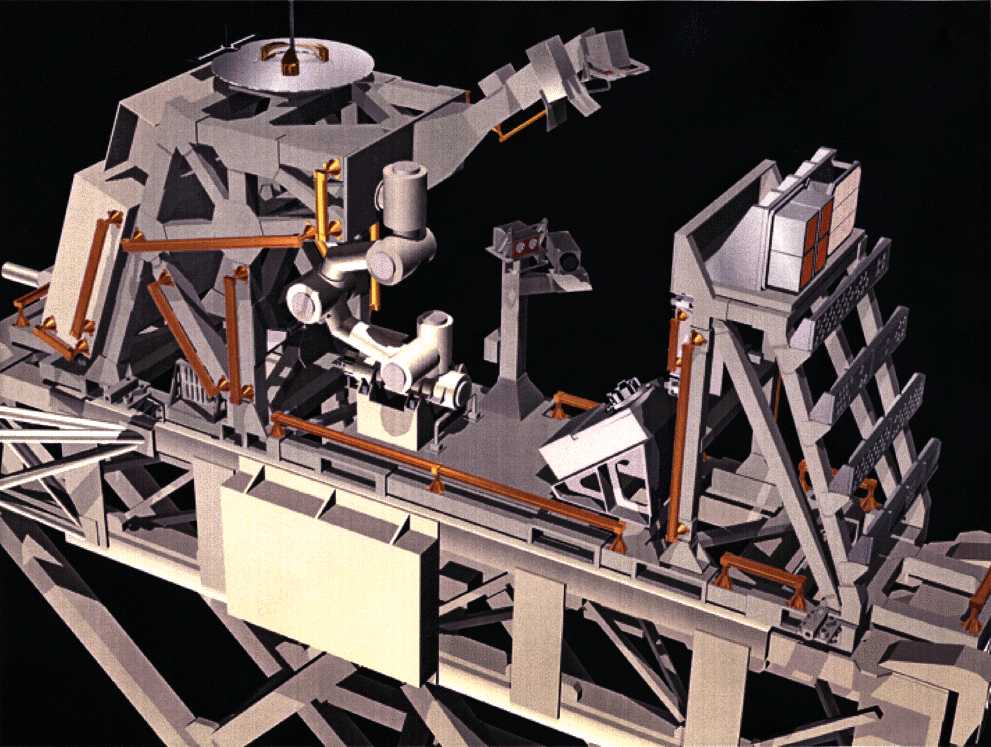
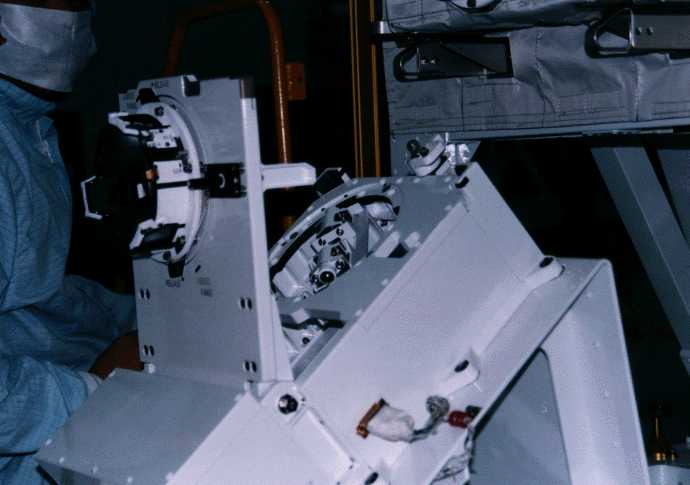
| MFD���{�b�g�A�[�� MFD Robot Arm |
�O����������j�b�g:ORU |
�h�A:DOOR |
|
|||
| (2) ������́A�܂��X�y�[�X�V���g���̌㕔��s�f�b�L�łl�e�c���[�N�X�e�[�V�����̑g�����s���A�l�e�c�V���g�����ڃV�X�e�����N�����܂��B���̌�A���{�b�g�A�[����ێ�����@�\���������A�V�X�e���K�n�̂��߂̑����A������Ԃł̃��{�b�g�A�[���̐��䐫�\�̕]�������s���܂��B
|
|||
(3) ���ɁAORU�̒E��������A�h�A�̊J�������s���ƂƂ��ɁAORU�c�����̃��{�b�g�A�[���̋@�\�E���\�̕]�������s���܂��B
|
|||
| (4) �A�҂ɔ����āA���{�b�g�A�[����ێ�����@�\�ɌŒ肵�܂��B
(5) ������́AMFD�V���g�����ڃV�X�e���ɌW��d���̗��������s���AMFD���[�N�X�e�[�V�����̕����E���[���s���܂��B
|
|||
���{�b�g�A�[���̎��J�����Ŏ擾�����摜����ɁA���{�b�g�A�[���̐�[�̈ʒu�E�p�����r�����A���u����̐��x�����コ���邽�߂̎���
���{�b�g�A�[���̎��J��������̉摜����ɁA���z�I�ȃJ�����ɂ��摜���쐬���A���u ����ɂ�郍�{�b�g�A�[���̉^�p�������コ���邽�߂̎���
![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)