
|
|||||
 |
 |
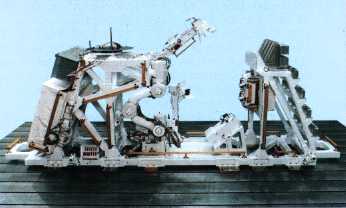
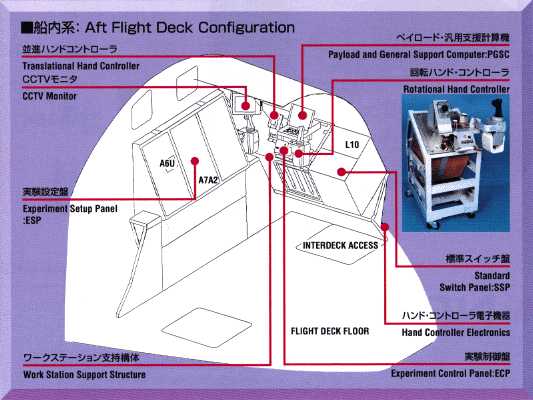
Therefore, the Manipulator Flight Demonstration (MFD) is planned to demonstrate the functions and performance of a robot arm similar to the JEMRMS Small Fine Arm using the Space Shuttle prior to a JEM launch. The robot arm will be installed in the Shuttle Orbiter cargo bay and operated by crew members in the Aft Flight Deck of the Shuttle Orbiter using hand controllers. The functions and the performance of the robot arm in the space environment will be confirmed, the Orbital Replacement Unit (ORU) detachment/attachment function and the hinged door opening/closing function will be demonstrated, and an advanced experiment to control the robot arm from the ground will be conducted. In addition to these robot arm experiments, the Evaluation of Space environment and Effects on Materials (ESEM) and the Two-Phase Fluid Loop Experiment (TPFLEX) will be conducted as piggyback experiments.
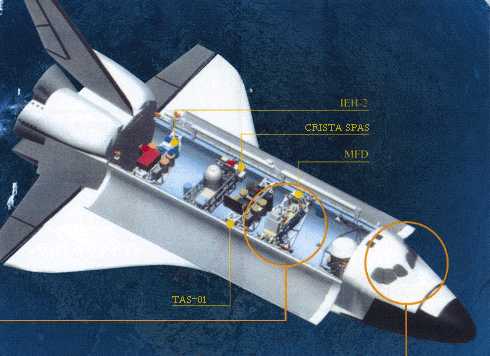
The MFD is scheduled for launch on STS-85 (Space Shuttle Discovery) on August 7, 1997.
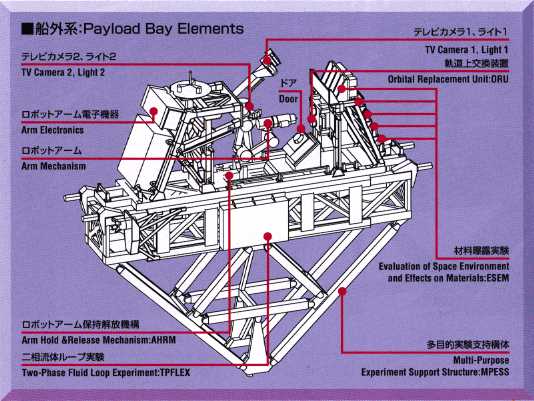
In addition, included in the PLB elements are the ESEM experiment to acquire material degradation characteristics in the space environment and cosmic dust data, and the TPFLEX experiments for the research and development of an active thermal control technology.
![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)

