
|
||||||
 |
 |
�|�@�䂪�����̃��{�b�g�A�[���̔�s���؎����@�|�@
![]()
�����ŁA���ڂ��̑ŏグ�ɐ悫�����A�X�y�[�X�V���g���𗘗p���āA���{�b�g�A�[���q�A�[���Ɠ����̃��{�b�g�A�[���̔�s���؎������s�����Ƃ�ړI�Ƃ����}�j�s�����[�^�[��s���؎����iMFD�j�v���i�߂Ă��܂��B���̌v��ł́A���{�b�g�A�[���q�A�[���Ɠ����̋@�\�E���\��L���郍�{�b�g�A�[���iMFD���{�b�g�A�[���j���V���g���̉ו����ɓ��ڂ��A������V���g����������D������n���h�R���g���[���[��p���đ��삷�邱�Ƃɂ��AMFD���{�b�g�A�[���̖��d�ʊ����ł̋@�\�E���\�̊m�F�������s���ƂƂ��ɁAORU�̌����@�\��A�h�A�J�@�\�̎��؎������s���܂��B�����āA�����̃��{�b�g�A�[���Z�p�̊J���Ɏ����邱�Ƃ�ړI�Ƃ��āA�V���g�����MFD���{�b�g�A�[����n�ォ�牓�u���삷��Ƃ����Z�p�������s���܂��B
�܂��A�����Ȃ���s�@���L���ɗ��p���邽�߁A���������Ƃ��āA�F�������ł̍ޗ��̗����f�[�^�����擾���邽�߂̍ޗ����I�����iESEM�j�A�y�і��d�ʊ����ł̗��̂ɂ��M����Z�p�̎������s�����̃��[�v�����iTPFLEX�j���s���܂��B
MFD�́A1997�N8��7���ɁA�f�B�X�J�o���[����STS-85�Ƃ��đł��グ����\��ł��B
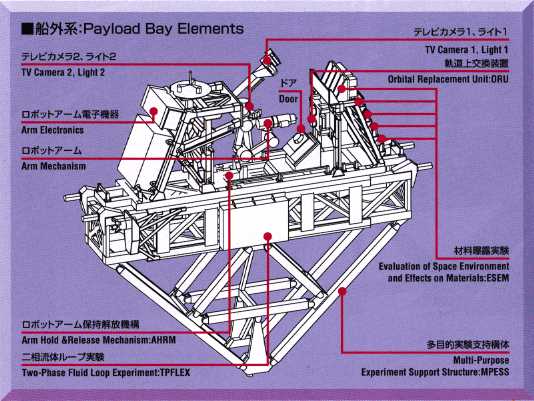
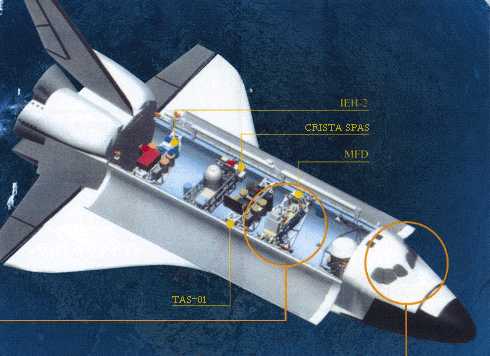
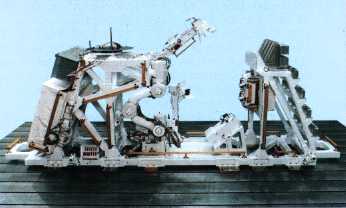
���@MFD�V���g�����ڃV�X�e���̍\��
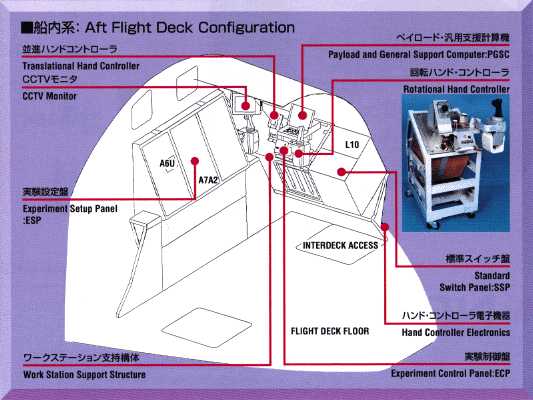
MFD�V���g�����ڃV�X�e���́A�V���g���̉ו����ɓ��ڂ����D�O�n�ƁA�㕔��s�f�b�L�ɓ��ڂ����D���n���� �\������܂��B�D�O�n�̓��{�b�g�A�[���𒆐S�Ƃ��āAORU��h�A���̋@�킩��\������A�D���n�̓��{�b�g�A�[���𑀍삷�邽�߂̃n���h�R���g���[���[�𒆐S�Ƃ��āA�e���r���j�^�[���̋@�킩��\������܂��B
�܂��AMFD�V���g�����ڃV�X�e���ɂ́A�F�����ɂ�����ޗ��̗����f�[�^��A�F���o�̊�b�f�[�^�̎擾��ړI�Ƃ���ޗ����I�����iESEM�j�@��A�y�ѓ��̃��[�v�ɂ��\���I�M����Z�p�Ɋւ���F��������ړI�Ƃ�����̃��[�v�����iTPFLEX�j�@�킪���ڂ���܂��B
![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)

