

実施日:飛行7日目
担当:ハイディマリー・ステファニション・パイパー、ロバート・キンブロー両宇宙飛行士
このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


実施日:飛行7日目
担当:ハイディマリー・ステファニション・パイパー、ロバート・キンブロー両宇宙飛行士
右舷S6トラスの設置(2009年のSTS-119ミッションで打上げ予定)に備えて、CETA(Crew and Equipment Translation Aid)カート2台を、国際宇宙ステーション(ISS)のロボットアーム(Space Station Remote Manipulator System: SSRMS)を使用して、ISSトラスの左舷側へ移動させます。
※CETAカートは、トラスのレール上を移動し、様々な作業場所に船外活動クルーや船外活動工具、および軌道上交換ユニット(Orbital Replacement Unit: ORU)を運搬したり、作業プラットフォームの役割を果たします。
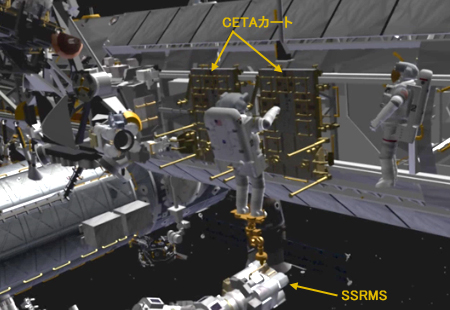
CETAカートの移動作業イメージ

SSRMSのエンドエフェクタ(把持手)(STS-108ミッション)
SSRMSのエンドエフェクタ(把持手)内部のワイヤー取付け部を、潤滑剤を使用して潤滑します。
2009年に宇宙ステーション補給機(H-II Transfer Vehicle: HTV)技術実証機(初号機)がISSに打上げられますが、HTVは、ISSに接近したところをSSRMSで把持されて、「ハーモニー」(第2結合部)に取付けられます。このため、HTV打上げまでにエンドエフェクタ(把持手)のケーブル取付け部への潤滑追加が必要とされています。
※潤滑して、グラプル・フィクスチャ(把持部)のグラプル・シャフトを巻き込むワイヤーの収納状況に若干の問題が生じている件に対処します。
第1回船外活動に引き続き、右舷側太陽電池パドル回転機構(Solar Alpha Rotary Joint: SARJ)のクリーニングおよびトランドル・ベアリング(Trundle Bearing Assembly: TBA)の交換作業を行います。
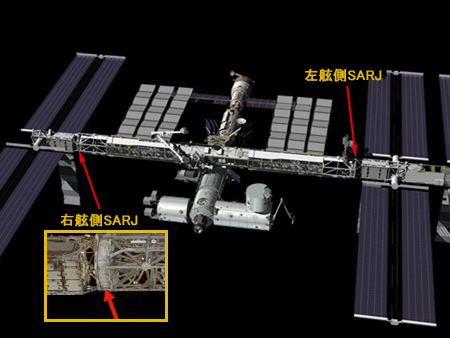
右舷側太陽電池パドル回転機構(SARJ)の位置
(写真、画像は全てNASA提供)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |