This is an archive of information released in the past.
Disclaimer: It may contain broken links or outdated information. Some parts may not function in current web browsers.
*Visit https://humans-in-space.jaxa.jp/en/ for the latest information.

Experiment
- News
- Kibo Utilization Strategy
- Kibo Utilization Plan
- List of JAXA's Utilization Themes
- Experiment Facilities
- Space Environment Utilization
- Archive
Operational checkout was performed for the Robot Experiment on JEM (REX-J), as one of the MCE missions
JAXA has confirmed that the robot's basic function*1, is properly working during the checkout performed from August 20 to 31, 2012, for the Robot Experiment on JEM (REX-J)*2, one of the Multi-mission Consolidated Equipment (MCE) mission experiments. MCE is installed on the Exposed Facility (EF) of Kibo, the Japanese Experiment Module.
The REX-J demonstration is planned for about 6 months from mid October to March 2013, to test the element technology inevitable for the tether-controlled robot locomotion.
*1: Image photographing by a small camera, extending & retracting of an extendable robot arm, open & close of a hand, wrist joint movement, rotating upper part of the body, and functional checkout of macro command.
*2: REX-J aims to develop a robot that assists or takes over astronauts' Extravehicular Activity (EVA) in the future. The mission will validate the element technology of spatial locomotion inevitable for the development of such robots by demonstrating robot's movement using an extendable robot arm and a tether. REX-J was launched from the Tanegashima space center (TNSC) on July 21, 2012 (JST) by KOUNOTORI3/H-IIB Launch Vehicle No. 3.
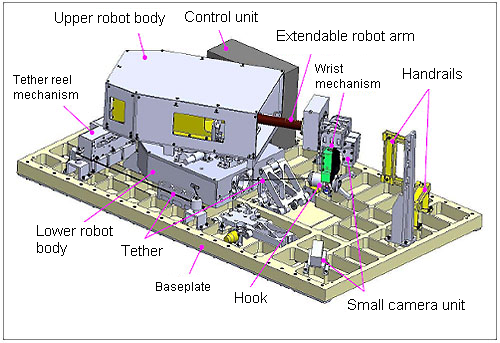
REX-J robot experiment equipment and its installation location of the MCE
【Robot's hand movement】
width="387" height="175" />
【Extension of a robot arm】
width="420" height="170" />
【Wrist joint movement】
 width="510" height="155" />
width="510" height="155" />(All photo credit: JAXA)
*All times are Japan Standard Time (JST)
| Copyright 2007 Japan Aerospace Exploration Agency | Site Policy |