このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。

よくある質問
- カテゴリー
スペースシャトルに関するQ&A
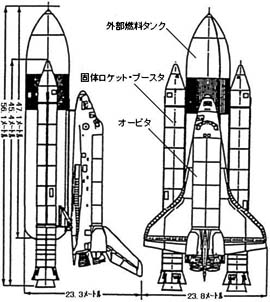
スペースシャトルの全体構成
スペースシャトルはオービタ、固体ロケット・ブースタ(Solid Rocket Booster: SRB)、外部燃料タンク(External Tank: ET)から構成されています。オービタと固体ロケットブースタは繰り返し利用できるように設計されています。
オービタ |
外部燃料タンク (ET) |
固体ロケットブースタ (SRB) |
スペースシャトル全体 |
|
| 概説 | スペースシャトル本体。地球に帰還した後整備されて、再利用されます。 | 打上げ後約9分で燃料の液体水素と液体酸素がなくなると切り放されます。 | 打上げから約2分間燃焼し、切り離され洋上に落下します。その後、回収され整備を受け、再利用されます。 | |
| 全長 | 37.2m | 47.0m | 45.5m | 56.1m |
| 直径 | 23.8m(翼幅) | 8.4m | 3.7m | 23.8m(翼幅) 23.9m(ET+オービタ垂直尾翼上部) |
| 高さ | 17.3m(着陸時) | - | - | - |
| 重量 | ディスカバリー:78.7t アトランティス:78.4t エンデバー:78.8t (SSME3基含む、貨物・燃料含まず 2000年2月現在) |
全重量 約750t (推進剤含む) 推進剤重量 720t 構造重量 26.5t (1998年6月以降) |
全重量 約589t/1基 (推進剤含む) 推進剤重量 496t/1基 構造重量 87t/1基 |
打上げ時全重量 約2,038t (貨物含む) ※ミッションにより2,020~2,050t程度と異なる。 |
| 推力 | メインエンジン1基あたり (推力104%時) 178t(海面上) 221t(真空中) |
- | 1,495t(海面上)/1基 | SSME:3基 534t SRB:2基 2,990t 打上げ時合計:約3,524t |
| 他 | ペイロードベイ(貨物室) 長さ 約18.3m 直径 約4.6m |
オービタ
スペースシャトルの胴体中央部には、ペイロードベイと呼ばれる直径4.6m、長さ18.3mの貨物室があります。
ここにはロボットアームや各ミッション毎に積み替える実験装置、衛星などが搭載されます。
スペースシャトルの後部にはスペースシャトル・メインエンジン(SSME)と呼ばれる液体酸素と液体水素を燃料とするエンジンが装備されていますが、これは打上げ時にだけ使用され、軌道上では使用しません。軌道上では軌道制御システム(Orbital
Maneuvering System:OMS)が使用されます。またスペースシャトルの姿勢制御は、RCSと呼ばれる小型のスラスター(噴射装置)が使われています。
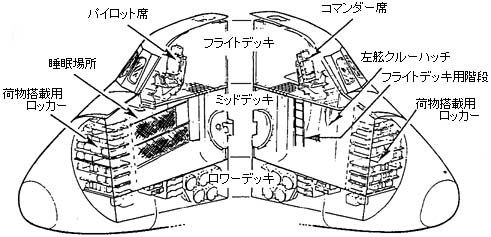
キャビン
スペースシャトルのキャビン(乗員区画)は、上からフライトデッキ、ミッドデッキ、ロワーデッキの三層に分かれています。
フライトデッキは、スペースシャトルの操縦を行うところです。地上との通信やロボットアームの操作、および地球観測もここから行われます。
ミッドデッキは、クルーの生活する区画です。食事や睡眠をここでとります。トイレもここにあります。また、ペイロードベイ(貨物室)に搭載された宇宙実験室やドッキングモジュール/エアロックへ行き来するための出入り口もここにあります。
ロワーデッキは、換気用のファン、流体ポンプ、ゴミ袋などが配置されています。機器や配管がぎっしり詰まっているため、クルーがこの中に入ることはありません。
ロボットアーム

後方フライトデッキの窓越しに見たロボットアーム
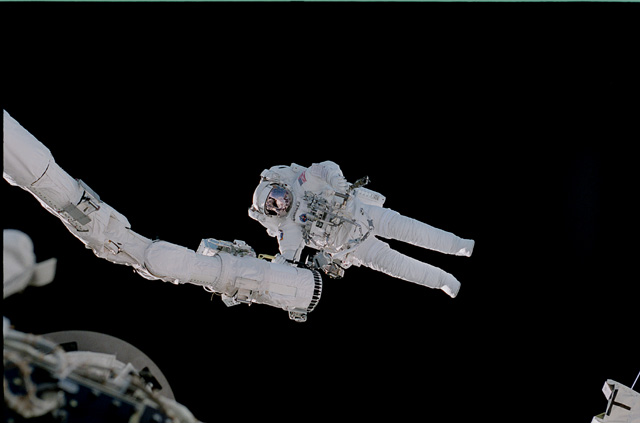
ロボットアームと船外活動クルー

ロボットアームを操作する若田宇宙飛行士
ロボットアームは、長さ約15m、直径約38cm、重さは約410kgあり、通常ペイロードベイ(貨物室)の左舷に取り付けられています。
約30トン※までの荷物を動かすことができ、人工衛星などのペイロード(貨物)を放出、回収する時に使用するものです。船外活動を行う宇宙飛行士の足をロボットアームの先に固定して船外活動をサポートする事もあります。
※STS-91から改良され、266トンまで動かせるよう強化されました。
ロボットアームは、クルーが後方フライトデッキの窓越しに、または専用のモニタテレビを見ながら操作します。若田宇宙飛行士は、2000年10月のスペースシャトル「ディスカバリー号」(STS-92/国際宇宙ステーション(ISS)組立ミッション(3A))で、このロボットアームを操作してZ1トラス及び与圧結合アダプター(PMA-3)をISSのユニティ(結合モジュール1)に取り付けたり、船外活動の支援を行いました。
スペースシャトル情報ページもご覧下さい。
関連サイト
- NASAスペースシャトルリファレンスマニュアル
http://www.spaceflight.nasa.gov/shuttle/reference/shutref/index.html
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |