|
||||||

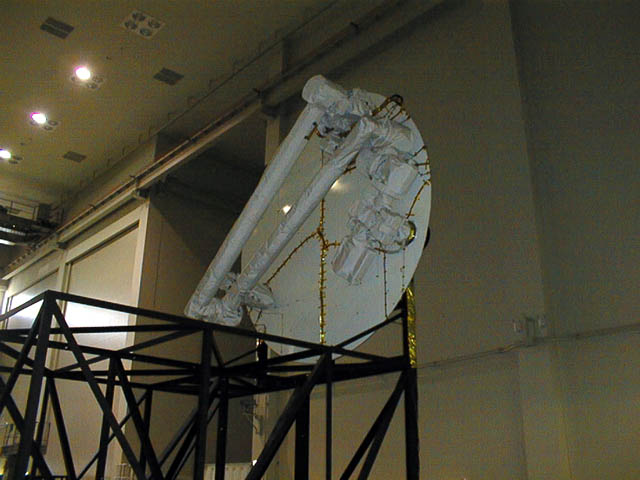
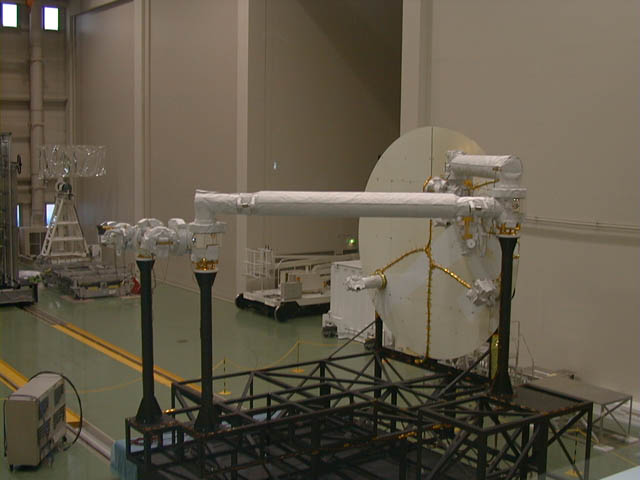
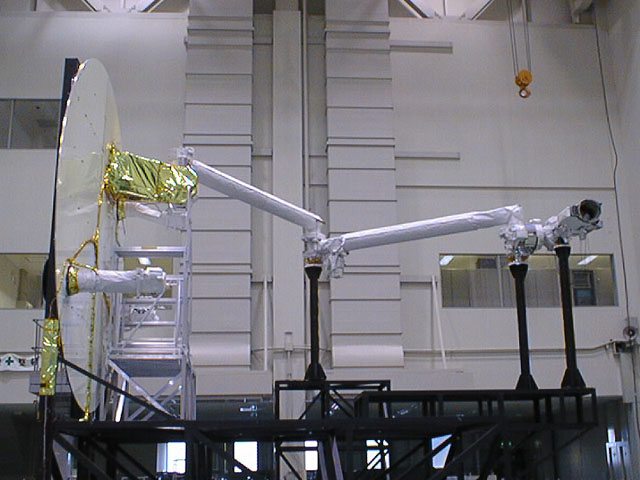
7月29日から8月27日まで、筑波宇宙センターで「きぼう」日本実験棟のロボットアームの親アームのフライトモデル(実機)を使用して熱真空試験が行われました。この試験の様子を紹介します。
この温度差240度以上の環境下でも、10年というISSの運用期間のあいだロボットアームがきちんと動作するよう断熱材とヒータを使った熱対策がとられています。ロボットアームは断熱材でカバーされ、ヒータの電源をオン・オフしてロボットアームの温度が要求範囲内に収まるようにしてあります。 今回の試験は、親アームの各部の温度が要求範囲内に制御できていることを確認するための地上での実証試験です。また、今回の実験データと設計段階で作成された熱数学モデルによるシミュレーション結果を比較します。もし、両者の値が大きく異なっていた場合は熱数学モデルを修正します。
この試験は、以下の2つの状態でそれぞれ行われました。
例えば今回の試験では、疑似太陽光を照射してデータを取得しましたが、太陽熱以外にも他の熱の影響を受けます。例えば、「きぼう」日本実験棟の船外実験プラットフォーム等からの放射熱を受けたり、ロボットアーム自身のいろいろな動作によっても熱が発生します。地上でこれらの試験を総合的に行い熱設計の良否を実証できればよいのですが、「きぼう」日本実験棟そのものが収まる試験設備がないことと、ロボットアームは微小重力環境下で動作するように設計されているため重力がかかる垂直方向での動作試験ができないことなどの理由で、地上では全てについて試験することはできません。そのため熱数学モデルでシミュレートして結果を予測します。
最終更新日:1999年 10月 7日
| |||||||||||||||||||||||||||||||||||||||||||||||