このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。

シグナス補給船によるISSへの補給フライト
シグナス補給船運用6号機(OA-5)ミッション

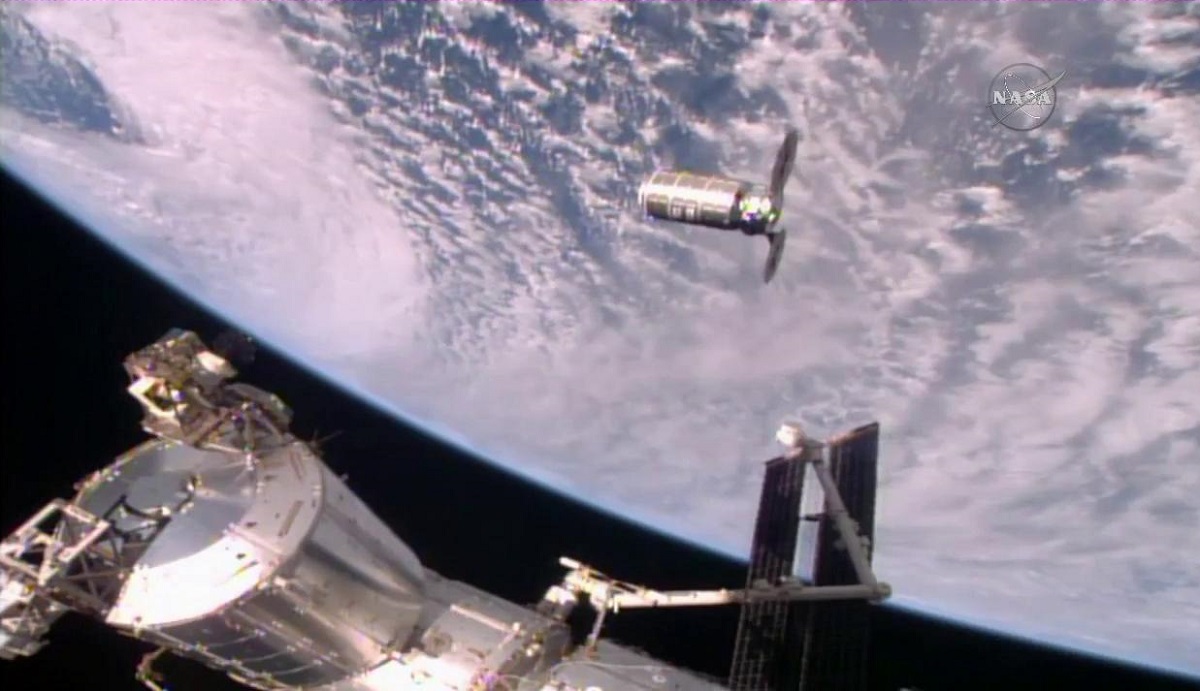
ISSを離脱したシグナス補給船運用6号機(出典:JAXA/NASA)
シグナス補給船運用6号機は、日本時間11月21日午後10時22分(米国中部標準時間11月21日午前7時22分)、国際宇宙ステーション(ISS)のロボットアーム(Space Station Remote Manipulator System: SSRMS)から放出され、ISSを離脱しました。この後、シグナス補給船運用6号機は飛行しながらSaffire-IIと呼ばれる実験や超小型衛星の放出などを行い、米国時間11月27日に軌道離脱噴射を行って大気圏に再突入しました。
大西宇宙飛行士、シグナス補給船を日本人として初めて把持
ISSに接近するシグナス補給船運用6号機(出典:JAXA/NASA)
日本時間10月23日午後8時28分(米国東部夏時間10月23日午前7時28分)、大西卓哉宇宙飛行士は、ISSのロボットアーム(SSRMS)を操縦し、日本人として初めてシグナス補給船を把持(キャプチャ)しました。その後、シグナス補給船は、同午後11時53分(米国東部夏時間同午前10時53分)、地上からの運用管制による遠隔操作で国際宇宙ステーション(ISS)の「ユニティ」に結合されました。
シグナス補給船は、日本の宇宙ステーション補給機「こうのとり」(HTV)が世界で初めて実現し確立した「ランデブ・キャプチャ」方式を採用しています。また、ISSへ接近する際に地上やISSと軌道位置・速度情報等のデータを無線通信しながら接近する運用を実現する技術として、日本が開発した近傍通信システム(PROX:Proximity Communication System)も搭載されています。筑波の「こうのとり」運用管制チームも運用に加わり、軌道上の大西宇宙飛行士と「チームジャパンの総合力」で今回のシグナス補給船による物資輸送を支えました。
地上からシグナス補給船の運用を支えた野川雄一郎HTVフライトディレクタは、今回のキャプチャについて、「大西宇宙飛行士によるキャプチャは非常に正確で、シグナスに採用された日本の技術とともに、日本の信頼性の高さを示すことができた」と述べました。

大西宇宙飛行士がキャプチャに成功した時の「こうのとり」管制室(出典:JAXA)

野川HTVフライトディレクタ(出典:JAXA)
大西宇宙飛行士、シグナス補給船のキャプチャを担当予定

シグナス補給船運用6号機の打上げ(出典:JAXA/NASA/Bill Ingalls)
シグナス補給船運用6号機(OA-5)は、10月18日午前8時45分(米国東部夏時間10月17日午後9時45分)、米国バージニア州NASAワロップス飛行施設より打ち上げられました。
この後、ISSに接近したシグナス補給船運用6号機は、大西卓哉宇宙飛行士が操縦するISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)により把持(キャプチャ)される予定です。把持予定日時は10月23日午後8時05分(米国中部夏時間10月23日午前6時05分)を予定しています。
シグナス補給船は、宇宙ステーション補給機「こうのとり」(HTV)のISSへのランデブ・結合方法と同じ方式を採用しています。これは、HTVが世界で初めて実現した、安全性の高いSSRMSを使ったISSへの結合方式で、米国の民間宇宙開発企業の補給船に採用されており、ISSにおける新たなスタンダードとして定着しています。
また、ISSに接近したシグナス補給船は、日本がHTVのために開発した近傍通信システム(Proximity Communication System: PROX)との通信を確立し、PROXを介してISSと通信を行います。これには筑波宇宙センター(TKSC)のHTV運用管制室の管制チームが有償でシグナス補給船の運用を支援しています。
- なお、把持(キャプチャ)の軌道上訓練について、大西宇宙飛行士が自身のGoogle+で綴っています。また動画でも解説していますので、ぜひご覧ください。
- 大西宇宙飛行士Google+
大西宇宙飛行士ISS長期滞在活動報告(Vol.18)
シグナス補給船の把持に向けて説明する大西宇宙飛行士
飛行概要

射点に立ったアンタレスロケット(出典:JAXA/NASA/Bill Ingalls)

打上げに向けた準備が進められるシグナス補給船運用6号機を搭載したアンタレスロケット(出典:JAXA/NASA/Bill Ingalls)
シグナス補給船運用6号機(OA-5*)ミッションは、オービタルATK社(Orbital ATK Inc.)のシグナス補給船を打ち上げ、国際宇宙ステーション(ISS)の「ユニティ」(第1結合部)に結合させ、物資を補給するフライトです。
*OA-5の打上げが当初の予定より遅れたため、OA-6が先に打ち上げられました。
打上げには、今回から1段のロケットエンジンを別のエンジンに切り替えた改良型のアンタレス230ロケットが使用されます。
シグナス補給船のISSへのランデブ・結合方法には、宇宙ステーション補給機「こうのとり」(HTV)と同じ方式が採用されています。ISSに接近したシグナス補給船は、日本がHTVのために開発した近傍通信システム(Proximity Communication System: PROX)を介してISSとデータ通信を行います。JAXAは、OA-5のISSへの接近やISSからの離脱時に、PROXの稼働状況を確認し、PROXの動作を確実に保つことによりOA-5の運用を支援します。
OA-5ミッションでは、食糧やクルーへの支給品、システム関連機器、実験関連機器などをISSに運びます。
飛行計画
| 打上げ日時 | 2016年10月18日午前8時45分(日本時間) 2016年10月17日午後7時45分(米国東部夏時間) |
|---|---|
| 射場 | 米国バージニア州NASAワロップス飛行施設 Mid-Atlantic Regional Spaceport (MARS) Pad-0A |
| 使用ロケット | アンタレス230ロケット |
| 重量 | 搭載品合計約2,400kg |
| SSRMSによる 把持日時 |
2016年10月23日午後8時28分(日本時間) 2016年10月23日午前6時28分(米国中部夏時間) |
| ISSへの 結合日時 |
2016年10月23日午後11時53分(日本時間) 2016年10月23日午前9時53分(米国中部夏時間) |
| ISS分離日時 | 2016年11月21日午後10時22分(日本時間) 2016年11月21日午前7時22分(米国中部標準時間) |
| 再突入日時 | 2016年11月28日午前8時40分頃(日本時間) 2016年11月27日午後6時40分頃(米国東部標準時間) |
OA-5 結合後のISSの形状
OA-5は、「ユニティ」(第1結合部)の地球側ポートに結合されます。
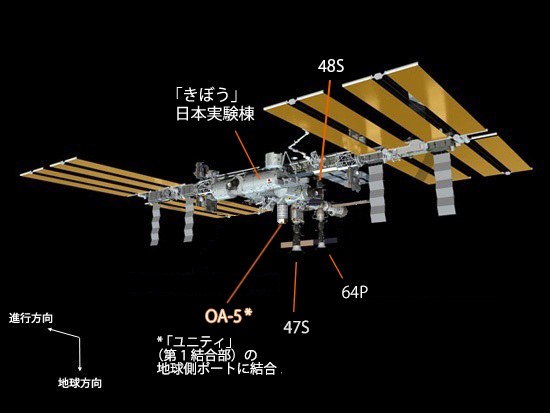
OA-5結合後のISSのイメージ(出典:JAXA/NASA)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |