
|
||||||
 |
 |
![]()
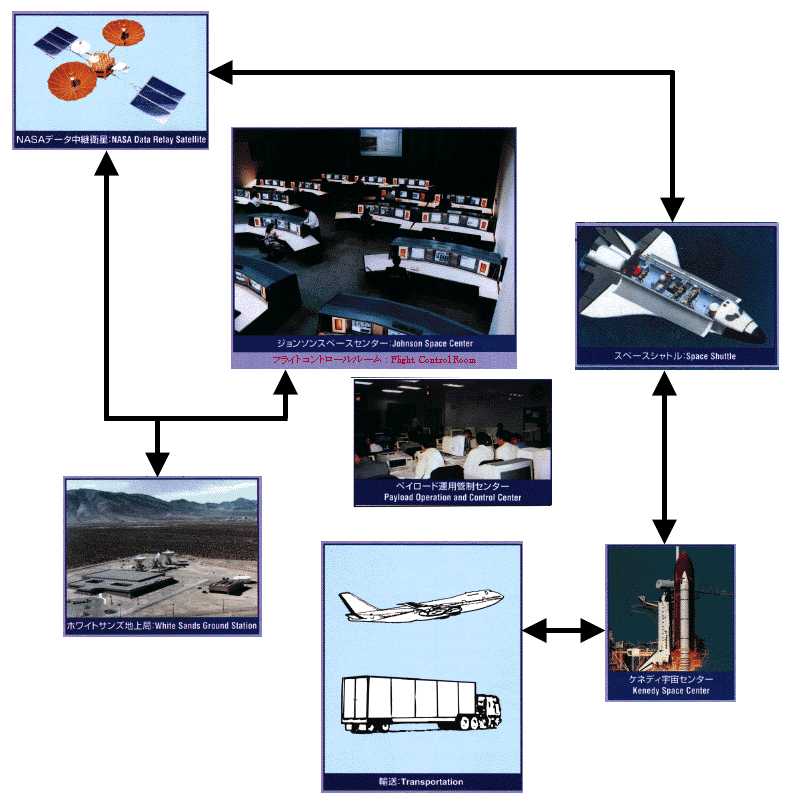
�@������́A�㕔��s�f�b�L�Ń��[�N�X�e�[�V������g�ݗ��Ă���AMFD�V���g�����ڃV�X�e���̗����グ�A�����`�F�b�N�A�E�g�A���{�b�g�A�[���̓W�J���s���A�K�n�̂��߂̊�{������s���ƂƂ��ɁA���S���ɌW��_�����s���܂��B���̌�A���{�b�g�A�[���������c�����Ă��Ȃ��������̐��䐫�\�m�F�������s���A������ORU�i�O����������u�j�̒E����A�h�A�̊J�ɌW����؎������s��ꂽ��AORU��c��������Ԃł̃��{�b�g�A�[���̐��䐫�\�m�F�������s���܂��B��s�^�p���̃r�f�I�J�����ɂ��f���́A�V���g���̃e�[�v���R�[�_�[�ɘ^�悳���ƂƂ��ɁA���̂����P�`�����l���̓��A���^�C���Œn��ɑ��M����܂��B�܂��A�e�����g���f�[�^�́A�V���g���̒ʐM�@��o�R�Œn��ɑ��M����A�n��ł̔�s�^�p�ǐ���A��s�^�p�Z�p�x���ɋ�����܂��B
�@�n�㉓�u��������́A������ɂ���s�^�p���I��������A���{�b�g�A�[�����W�J���ꂽ��ԂŁA����������{�b�g�A�[���̐��䃂�[�h��n�㉓�u���샂�[�h�ɐ芷���A���쌠��n�㑤�Ɉ����n�����Ƃɂ��J�n����܂��B
�@ESEM�����@��̂����̍ޗ����I�����@��ɂ��ẮA�V���g���̉ו����h�A���J���Ă���ԂɉF�����ɔ��I����܂��B�܂��A�F���_�X�g�E�R���N�^�[�ɂ��ẮA���̎����@����A�I�[�r�^�̉ו����h�A���J������ԂŁA���I�ʂ��40���ԑ��x�x�N�g���i�i�s�����j�Ɍ����邱�Ƃɂ��A�F���_�X�g�̎��W���s���܂��B
�@

![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)

