
|
||||||
 |
 |
![]()
�F���X�e�[�V�����́u���ڂ��v���{�������́A�䂪�����́u�O����������v�Ƃ��āA�F�������p�����̒��j�ƈʒu�t�����Ă��܂��B���ł��A���ڂ��̑D�O�����v���b�g�t�H�[���́A�펞�F���ɔ��I���ꂽ�F�������p�����̏�Ƃ��āA�䂪���̓����I�Ȏ����ɗ��p�����ƂƂ��ɁA���ۋ��͂̏�Ƃ��Ă����p����܂��B���ڂ��D�O�����v���b�g�t�H�[���ł́A���ډF�����ɔ������Ƃ����������������āA�e��̍ޗ������A�n���ϑ���F�����v���A�ʐM�₻�̑��̍H�w���������s���܂��B�܂��A���ڂ��D�O�����v���b�g�t�H�[���ɂ́A�����̎������u�̎x�����s�����߂̃|���v�A�z�d���u�A�v�Z�@�Ȃǂ̎x�����u�����ڂ���܂��B�����̎x�����u�́A�ۑS�������߂邽�߂ɁA�O����ŗe�ՂɌ������ł���悤�ɐv����Ă��āA�O����������u�iORU�j�ƌĂ�Ă��܂��B����s�����������ORU�́A�V����ORU�ƌ������ꂽ��A�C���̂��߂ɒn��֎����A���܂��B
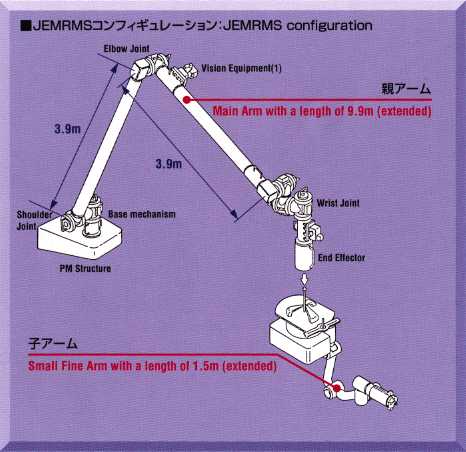
���̂悤�ɁA���{�b�g�A�[���͂��ڂ��̍\���v�f�̒��ł��@�\�I�ɏd�v�ł���A���Z�p�I�ɍ��x�Ȃ��̂ł��B���̃��{�b�g�A�[���̊J�����m���ɍs�����߂ɁA���̑ŏグ�ɐ悾���āAMFD�i�}�j�s�����[�^�[��s���؎����j�Ƃ��āA���{�b�g�A�[���q�A�[���Ɠ����̃��{�b�g�A�[���̔�s���؎������s���܂��B
![[HOME]](home.gif)
![[INDEX]](index.gif)
![[TOP]](top.gif)

