
最終更新日:2015年8月7日
実験の背景 植物は、地球の重力を上手に利用し、生きていくのに必要な体作りや姿勢、伸長方向の制御を行っています。こうした植物の重力に対する応答でよく知られているのが「重力屈性」ですが、植物の他の成長現象も重力応答によって制御されることが報告されています。例えば、茎や根などの器官が首(先端部)を振り、回旋しながら伸長する「首振り運動(専門用語で回旋転頭運動)」も、重力の影響を受けると考えられてきました(図1)。植物の首振り運動は、チャールズ・ダーウィンの研究以来、多くの研究者がそのメカニズムや重力応答との関係を明らかにしようとしてきました。しかし、首振り運動の原動力やメカニズムについては諸説あり、重力応答の必要性についても未だ論争が続いています。 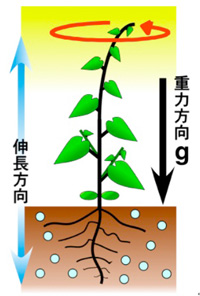
図1 植物の茎頂における回旋転頭運動(出典:東北大学) 図1-1 アサガオのツル巻き運動(出典:東北大学) 実験の目的 これまでの研究結果より、植物の首振り運動には重力応答が必要であると考えられています。すなわち、重力応答が起こらない微小重力下では、首振り運動が起こらなくなるか、首振りの様子が変化すると考えられます。本実験の目的は、微小重力環境を利用して、首振り運動の重力応答性を解明することです。アサガオのようなツル性植物は、首振り運動によって支柱に巻き付いて「よじ登る」ことが出来ますが、首振り運動ができなければよじ登ることができず、自分より背丈の大きな植物に覆われて、光合成に必要な光を十分に受けられません(図2)。このことからも、首振り運動が植物の生存戦略として、いかに重要な形質であるかがわかります。植物の首振り運動の重力依存性を解明して、世界に先駆けてモデルを構築することは、「宇宙空間における植物育成法の開発」だけでなく「月や火星での植物の適応や進化」について推察するうえで、非常に重要な研究です。 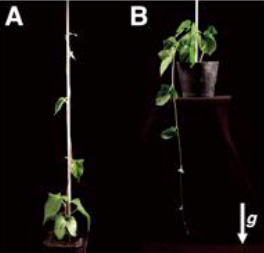
図2 野生型アサガオ(A)とシダレアサガオ(B)の重力応答(出典:東北大学) 実験内容 イネおよびアサガオの種子を軌道上微小重力下および1G(遠心機による人工重力)下で発芽・生育させ、それら芽生えの成長・運動を動画として撮影・記録します (図3)。それらの画像をダウンリンクし、比較解析することによって、重力が回旋転頭運動に及ぼす影響に関する仮説を検証します。 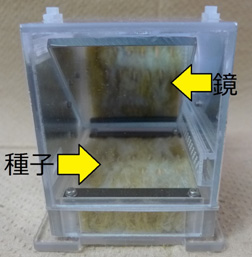
図3 植物生育容器(出典:JAXA) ココがポイント! 植物のよじ登りに重力が必要なのかは、まだ議論に決着がついていません。本研究によって、これまでの論争、つまり、よじ登りに重力が必要か、必要でないかの議論に結論を出すことができます。その結論を出すことが、植物生理学・植物環境感覚分野のブレークスルーとして大きなインパクトをもたらします。また、本実験の成果は、人類の長期宇宙滞在を可能にする食糧維持システムの構築に貢献するのみならず、地球上で効率的に植物を生産するための成長制御法の開発や、植物の姿勢制御を理想的に変化させるための技術開発へと応用することができます。例えば、狭い面積で多くの収量を持つ品種の開発や、台風の時に倒れてもすぐに置きあがるイネを作ることも夢ではありません。 
図4 高橋研究室の作業風景(アサガオを生育中)(出典:東北大学) Written By Chiaki Yamazaki and Sachiko Yano Plant Rotation トップページへ | 「きぼう」での実験ページへ 
|
| Copyright 2007 Japan Aerospace Exploration Agency | サイトポリシー・利用規約 ヘルプ |