このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で

よくある質問
- カテゴリー
スペースシャトルに関するQ&A
スペースシャトルのロボットアームはどこでどのように操作するのですか。

SRMSを操作する若田宇宙飛行士
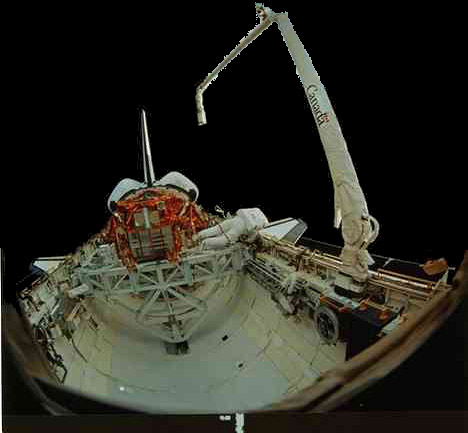
後部フライトデッキ側から見たSRMS
並進用ハンドコントローラ(THC)
回転用ハンドコントローラ(RHC)
スペースシャトルのロボットアーム(SRMS)は、スペースシャトルのペイロードベイ(貨物室)の、機首に向って左側前方の縁に取付けられています。
ロボットアームの操作卓はスペースシャトルのフライトデッキの後方、操縦席の反対側の窓際にあります。
操作卓には並進用のハンドコントローラ(THC)と回転用のハンドコントローラ(RHC)があり、1本のロボットアームを両手を使って操作します。
並進用ハンドコントローラでロボットアーム先端部の位置を、回転用ハンドコントローラで姿勢を制御します。
この操作は操作卓のTVモニタと、窓の外のロボットアームを見ながら行います。
宇宙ステーションの組立作業では、取扱う対象が大きかったり、操作が複雑で目では直接見えない部分がありますので、操作卓のTVモニタのみで監視しながら作業出来るよう、特殊な装置が開発されています。
最終更新日:2003年3月13日
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |