|
||||||

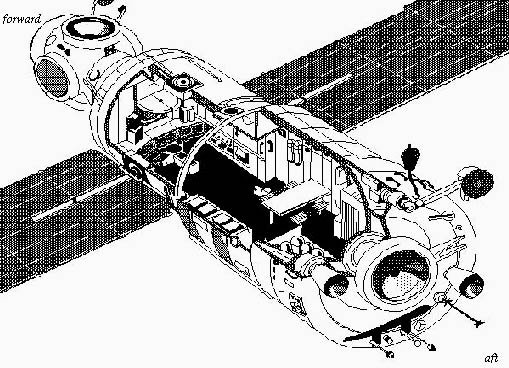
ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپA2000”N 7Œژ‚ة3”ش–ع‚جƒXƒeپ[ƒVƒ‡ƒ“‚جچ\گ¬—v‘f‚ئ‚µ‚ؤپA–³گl‚إ‘إڈم‚°‚ç‚ê‚é—\’è‚إ‚·پB‘إڈم‚°‚ç‚ꂽ‚ ‚ئ‚حپA‚·‚إ‚ةچ‚“x–ٌ402km‚إ‹O“¹‚ًژü‰ٌ‚µ‚ؤ‚¢‚éƒUپ[ƒٹƒƒپEƒRƒ“ƒgƒچپ[ƒ‹پEƒ‚ƒWƒ…پ[ƒ‹‚ئگع‘±ƒ‚ƒWƒ…پ[ƒ‹پEƒ†ƒjƒeƒB‚ةƒٹƒ‚پ[ƒgگ§Œن‚إƒhƒbƒLƒ“ƒO‚µ‚ـ‚·پB پ@ڈd—ت42,000lb(–ٌ19.0t)‚جƒ‚ƒWƒ…پ[ƒ‹‚حپAƒچƒVƒA‚جƒ~پ[ƒ‹‰F’ˆƒXƒeپ[ƒVƒ‡ƒ“‚ج’†ٹj‚ئ‚ب‚郂ƒWƒ…پ[ƒ‹‚ئ‚و‚ژ—‚½ƒŒƒCƒAƒEƒg‚إ‚ ‚èپA‰F’ˆƒXƒeپ[ƒVƒ‡ƒ“‚جڈ‰ٹْ’iٹK‚إ‚جگ¶ٹˆƒXƒyپ[ƒXپAگ¶–½ˆغژƒVƒXƒeƒ€پA“d—ح‚ج•ھ”zپAƒfپ[ƒ^ڈˆ—ƒVƒXƒeƒ€پA”ٍچsگ§ŒنƒVƒXƒeƒ€پA‹y‚رگ„گiƒVƒXƒeƒ€‚ً’ٌ‹ں‚µ‚ـ‚·پB‚ـ‚½پA’nڈم‚ج”ٍچsٹاگ§—vˆُ‚©‚ç‚جƒٹƒ‚پ[ƒgگ§Œن‹@”\‚ًٹـ‚ق’تگMƒVƒXƒeƒ€‚à’ٌ‹ں‚µ‚ـ‚·پB پ@‚±‚ê‚ç‚جƒVƒXƒeƒ€‚ج‘½‚‚حپAŒم‚ةپAƒAƒپƒٹƒJ‚جƒXƒeپ[ƒVƒ‡ƒ“چ\گ¬—v‘f‚ة‚و‚ء‚ؤ•âٹ®‚³‚ꂽ‚èپA’u‚«ٹ·‚¦‚ç‚ꂽ‚肵‚ـ‚·‚ھپAƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپAچ‘چغ‰F’ˆƒXƒeپ[ƒVƒ‡ƒ“‚جƒچƒVƒA•”•ھ‚ج‹@”\“IپAچ\‘¢“I‚ب’†ٹjƒ‚ƒWƒ…پ[ƒ‹‚ئ‚µ‚ؤ‚±‚جŒم‚à‹@”\‚µ‚ـ‚·پB پ@ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپA‘S’·43ft(–ٌ13.1m)پA‘¾—z“d’rƒpƒhƒ‹‚ج—¼—ƒ‚جگو’[‚ـ‚إ‚ج’·‚³‚حپA97.5ft(–ٌ29.7m)‚إ‚·پBƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚ة‚حپA‚R‚آ‚ج—^ˆ³‹و‰و‚ھ‚ ‚èپA‘O•û•”•ھ‚ةپAڈ¬Œ^‚إ‹…Œ`‚جˆع‘—‹و‰و(ƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg)‚ھپA’†‰›•”‚ةپA’·‚¢‰~“›Œ`‚جژهچى‹ئ‹و‰وپiƒڈپ[ƒN¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒgپj‚ھپAŒم•û•”‚ةپA‰~“›Œ`‚جˆع‘—ƒ`ƒƒƒ“ƒoپ[پiƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒ`ƒƒƒ“ƒoپ[پj‚ھ‚ ‚è‚ـ‚·پB ƒ‚ƒWƒ…پ[ƒ‹‚جŒم•û‚ة‚حپAƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒ`ƒƒƒ“ƒoپ[‚جٹO•”‚ً—^ˆ³‚³‚ê‚ؤ‚¢‚ب‚¢‘g—§‹و‰وپiƒAƒZƒ“ƒuƒٹ¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒgپj‚ھ•¢‚ء‚ؤ‚¢‚ـ‚·پBƒAƒZƒ“ƒuƒٹ¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg‚ة‚حپAگ„گiچـƒ^ƒ“ƒNپAƒXƒ‰ƒXƒ^پ[پA’تگMƒAƒ“ƒeƒi“™‚جٹO•”‹@ٹي‚ًگف’u‚µ‚ؤ‚¢‚ـ‚·پB پ@ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپA‚S‚آ‚جƒhƒbƒLƒ“ƒO¥ƒ‚ƒWƒ…پ[ƒ‹‚ًژ‚؟پA‚P‚آ‚حپAŒم•û‚جƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒ`ƒƒƒ“ƒoپ[‚ة‚ ‚èپAژc‚è‚ج‚R‚آ‚حپA‘O•û‚ة‚ ‚é‹…Œ`‚جƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg‚ةپi‚R‚آ‚ج‚¤‚؟‚ج‚P‚آ‚ح‘O•û‚ةˆت’u‚µ‚ؤ‚¨‚èپA‚P‚آ‚حڈم•û‚ةپA‚P‚آ‚ح‰؛•û‚ةپjˆت’u‚µ‚ؤ‚¢‚ـ‚·پBŒم•û‚جƒhƒbƒLƒ“ƒO¥ƒ|پ[ƒg‚ة‚حپAƒ\ƒ†پ[ƒY‰F’ˆ‘DپA‹y‚ر–³گl‚جƒvƒچƒOƒŒƒX•â‹‹‘D‚ھƒhƒbƒLƒ“ƒO‚·‚邱‚ئ‚ھ‚إ‚«‚éƒhƒbƒLƒ“ƒO‹@چ\‚ً—L‚µ‚ـ‚·پB‚ـ‚½پAژ©“®‰»‚³‚ꂽƒ‰ƒ“ƒfƒuپAƒhƒbƒLƒ“ƒOƒVƒXƒeƒ€‚à‘•”ُ‚³‚ê‚ـ‚·پB‘O•û‚جƒhƒbƒLƒ“ƒO¥ƒ|پ[ƒg‚ح‘S‚ؤپAƒnƒCƒuƒٹƒbƒh¥ƒhƒbƒLƒ“ƒO‹@چ\‚ً—L‚µ‚ؤ‚¨‚èپA‘O•û‚ة–ت‚µ‚ؤ‚¢‚éƒ|پ[ƒg‚إFGB‚ئƒhƒbƒLƒ“ƒO‚µپAڈم•û‚جƒ|پ[ƒg‚ة‚حپAˆبŒم‚ج‘g—§ƒtƒ‰ƒCƒg‚إƒچƒVƒA‚جƒTƒCƒGƒ“ƒX¥ƒpƒڈپ[¥ƒvƒ‰ƒbƒgƒtƒHپ[ƒ€(SPP)‚ھ‰^‚خ‚ê‚ـ‚·پB‰؛‘¤‚جƒ|پ[ƒg‚ة‚حپAˆبŒم‚ج‘g—§ƒtƒ‰ƒCƒg‚إƒچƒVƒA‚جƒ†ƒjƒoپ[ƒTƒ‹¥ƒhƒbƒLƒ“ƒO¥ƒ‚ƒWƒ…پ[ƒ‹(UDM)‚ھ‰^‚خ‚ê‚é—\’è‚إ‚·پB پ@ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚ج‹ڈڈZگف”ُ‚ئ‚µ‚ؤ‚حپAگ‡–°—p‚جŒآگl‹و‰وپAƒgƒCƒŒ‚ئگô–تگف”ُپA’²—گف”ُپAگHژ–—p‚جƒeپ[ƒuƒ‹‚ھٹـ‚ـ‚ê‚ـ‚·پB‚±‚جƒ‚ƒWƒ…پ[ƒ‹‚ة‚حپA‘O•û‚جƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg‚ة‚ ‚éپAƒhƒbƒLƒ“ƒOڈَ‹µ‚ًٹدژ@‚·‚é’¼Œa9ƒCƒ“ƒ`(–ٌ23cm)‚ج‘‹3ŒآپAƒڈپ[ƒLƒ“ƒO¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg‚ة‚ ‚é16ƒCƒ“ƒ`(–ٌ40cm)‚ج‘هŒ^‚ج‘‹1ŒآپAٹeƒNƒ‹پ[‚ج‹ڈژ؛‚ة‚»‚ꂼ‚ê1‚آ‚أ‚آپA‚³‚ç‚ةپA’n‹…‚⃂ƒWƒ…پ[ƒ‹“¯ژm‚جٹدژ@‚ًچs‚¦‚é‚و‚¤‚ة”z’u‚³‚ꂽ‘‹‚ًٹـ‚ك‚ؤچ‡Œv‚إ‚P‚SŒآ‚ج‘‹‚ھ‚ ‚è‚ـ‚·پB‰^“®(ƒGƒNƒTƒTƒCƒY)—p‚ج‹@ٹي‚ئ‚µ‚ؤ‚حپANASA‚ھ’ٌ‹ں‚·‚éƒgƒŒƒbƒhƒ~ƒ‹پi•àچsٹيپjپAژ©“]ژش‚±‚¬ٹي‚ھگف’u‚³‚ê‚ـ‚·پBƒNƒ‹پ[‚ھگ¶گ¬‚·‚é‰کگ…‚⃂ƒWƒ…پ[ƒ‹“à‚©‚ç‚ج‹أڈkگ…‚حپAƒ‚ƒWƒ…پ[ƒ‹“à‚ةگف’u‚³‚ê‚éژ_‘f”گ¶‘•’u‚إژg—p‚³‚êƒٹƒTƒCƒNƒ‹‚³‚ê‚ـ‚·‚ھپAˆù—؟گ…‚ئ‚µ‚ؤ‚حƒٹƒTƒCƒNƒ‹‚·‚éŒv‰و‚ح‚ ‚è‚ـ‚¹‚ٌپB پ@ƒچƒVƒA‚جOrlan-M‰F’ˆ•‚ًژg—p‚µ‚ؤ‚ج‘DٹOٹˆ“®‚حپAƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚جƒgƒ‰ƒ“ƒXƒtƒ@پ[¥ƒRƒ“ƒpپ[ƒgƒپƒ“ƒg‚ًƒGƒAƒچƒbƒN‘م‚ي‚è‚ةژg—p‚·‚éژ–‚ة‚و‚èژہژ{‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پBƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپAƒ‚ƒXƒNƒڈ‚ئƒqƒ…پ[ƒXƒgƒ“‚جƒ~ƒbƒVƒ‡ƒ“¥ƒRƒ“ƒgƒچپ[ƒ‹¥ƒZƒ“ƒ^پ[(MCC)‚ئ‚جٹش‚إپAƒfپ[ƒ^پA‰¹گ؛پAƒeƒŒƒr‰f‘œ‚ً’ٌ‹ں‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پBپ@ پ@ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپAƒJƒUƒtƒXƒ^ƒ“‚جƒoƒCƒRƒkپ[ƒ‹‰F’ˆٹî’n‚©‚çƒچƒVƒA‚جƒvƒچƒgƒ“¥ƒچƒPƒbƒg‚إ‘إڈم‚°‚ç‚ê‚é—\’è‚إ‚·پB‘إڈم‚°ژ‚ة‚حپA‘½‚‚جƒVƒXƒeƒ€‚حƒXƒ^ƒ“ƒoƒC¥ƒ‚پ[ƒh‚ئ‚³‚ê‚ؤ‚¢‚ـ‚·پB‹O“¹“ٹ“üŒم‚ة‚حپAژ–‘O‚ةƒvƒچƒOƒ‰ƒ€‚³‚ꂽƒRƒ}ƒ“ƒh‚ة‚و‚èپAٹeƒVƒXƒeƒ€‚ھ‹N“®‚³‚êپA‘¾—z“d’rƒpƒhƒ‹‹y‚رپA’تگMƒAƒ“ƒeƒi‚ھ“WٹJ‚³‚êپAٹ®‘S‚بٹˆ“®ڈَ‘ش‚ة‚³‚ê‚ـ‚·پBƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚ح‚»‚جŒمپA‚·‚إ‚ة‹O“¹‚ًژü‰ٌ‚µ‚ؤ‚¢‚éƒUپ[ƒٹƒƒپEƒRƒ“ƒgƒچپ[ƒ‹پEƒ‚ƒWƒ…پ[ƒ‹پiFGB‚ئ‚àŒؤ‚خ‚ê‚éپj‚ئƒ†ƒjƒeƒBپEƒ‚ƒWƒ…پ[ƒ‹پiƒmپ[ƒh‚P‚ئ‚àŒؤ‚خ‚ê‚éپj‚ئ‚جƒhƒbƒLƒ“ƒO‚ج‚½‚كپAژَ“®“I‚بڈَ‘ش‚ة“ü‚è‚ـ‚·پBژَ“®“I‚بپu–ع•Wپv‚ئ‚ب‚ء‚½ƒTپ[ƒrƒX¥ƒ‚ƒWƒ…پ[ƒ‹‚حپAƒچƒVƒA‚جژ©“®ƒ‰ƒ“ƒfƒu¥ƒhƒbƒLƒ“ƒO¥ƒVƒXƒeƒ€‚ئ’nڈم‚©‚ç‚جگ§Œن‚ة‚و‚èپAƒUپ[ƒٹƒƒپ^ƒ†ƒjƒeƒB‚ئƒ‰ƒ“ƒfƒuپAƒhƒbƒLƒ“ƒO‚µ‚ـ‚·پB ڈo“TپFNASA Fact Sheet Library The Service Module: A Cornerstone of Russian International Space Station Modules پi1999”N 1Œژپj ‚و‚è
|