|
|||||

Shuttle Engineering Simulator Astronaut training conducted at Johnson Space Center effectively utilizes simulators that apply computer graphics technologies. Among those simulators the Shuttle Engineering Simulator (SES), along with VRLaboratory, is very popular and utilized very often. An SES simulates views from a Space Shuttle. There are three SESs, SES FWD (Forward Station) ,SES AFT(Aft Station), and SES DOME(Dome Station), that are utilized for specific training purposes. SES FWD generates the view from the cockpit, and SES AFT generates the view from the aft deck of a Shuttle. Various situations are programmed for each simulator as computer graphics to be submitted for training. SES FWD is used by pilots and commanders for Shuttle landing training. SES AFT is used for payload deployment and recovery training using the robot arm, and for rendezvous and docking or extravehicular activity support training. SES DOM projects images the view from the rear side of a Shuttle on a large semi-sphere dome and allows conducting similar type of training as SES AFT but with more realistic images than the SES AFT. Utilizing simulators effectivly The advantage of using such simulators is that training time can be saved. To conduct training using NBL or MDF life-size mockups are used, which has the advantage of allowing trainees to feel the size of the actual facility that will be used in space. However it has the disadvantage that training support engineers have to prepare and set-up mockups, which forces more support engineers to work harder and longer. The SES is a computer-controlled simulator and can be used by just programming training cases beforehand. It allows trainees to start training from any part of the training sequence. Facilities like SESs are very useful for a large organization like NASA that maintains over150 astronauts. NASA thus utilizes these facilities very effectively for everyday training. PMA-3 manipulating training
Astronaut Wakata received the PMA-3 manipulation training using a robot
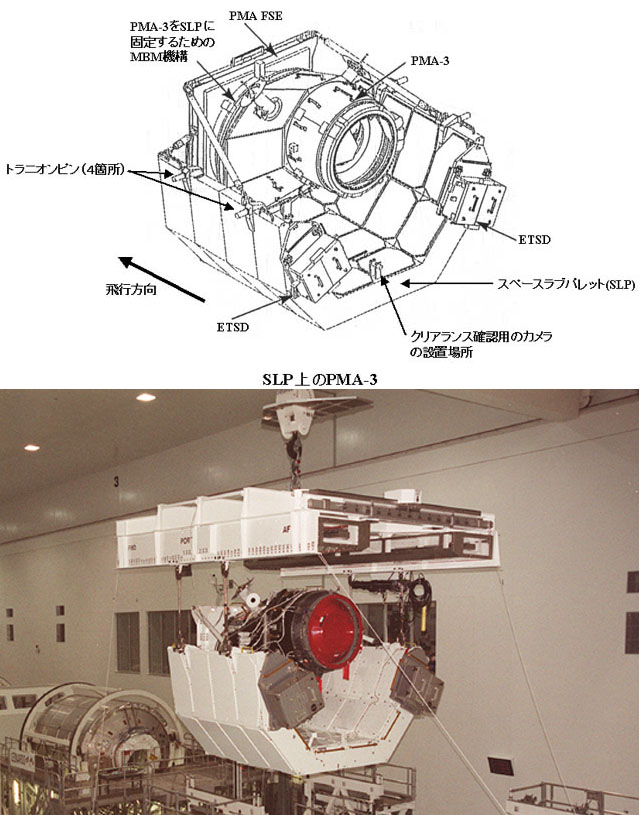
arm, in the SES DOME on August 4, 2000. PMA-3 will be launched fixed
to a pedestal called the Spacelab Pallet (SLP). Once PMA-3 is on orbit,
an EVA crew will loosen the bolts and latches of the Manual
Berthing Mechanism (MBM) that attaches the PMA-3 to the SLP, and
then astronaut Wakata will pick up the PMA-3 using the robot arm and
mate it to Node-1. Since the clearance between the PMA-3 and the SLP
is very small when the PMA-3 is released from the SLP, and because the
robot arm has to be operated close to its singularity point when carrying
PMA-3 to Node-1, this is a very difficult but interesting task for a
robot arm operator.
Last Update : September 12, 2000
|