| Astronaut Wakata's training report (2) |
|
Robot arm operation training
 |
| (Fig.1) MDF |
|
 |
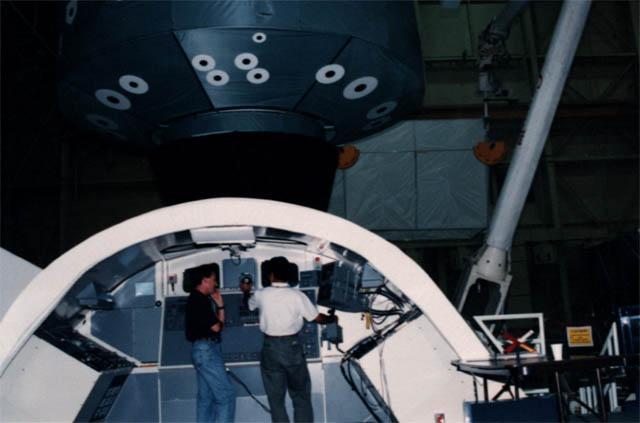
| (Fig.2) Astronaut Wakata
performing robot arm operation training on the aft flight deck of
the MDF. |
|
 |
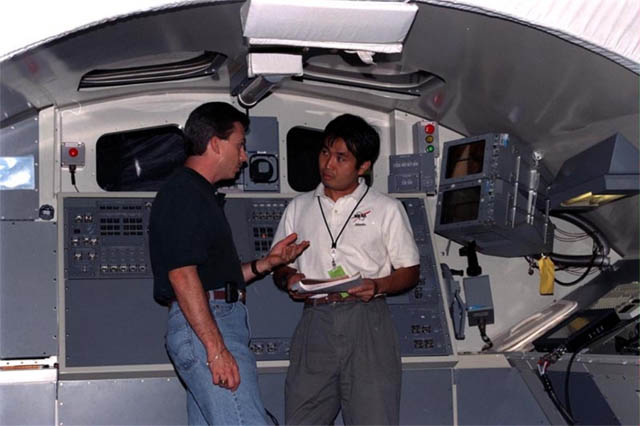
| (Fig.3) Astronaut Wakata
discussing operations with the robot arm training instructor. |
|
 |
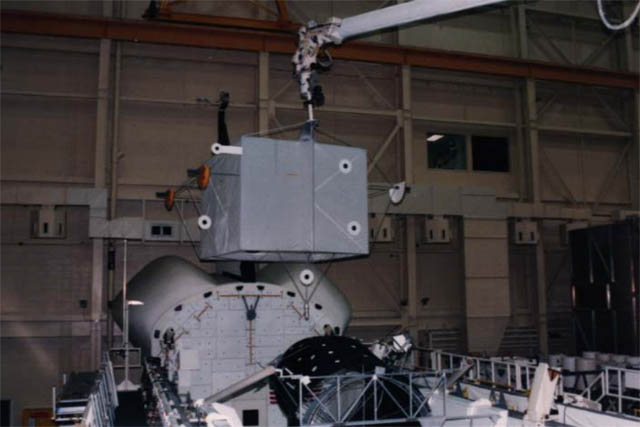
| (Fig.4) Confirming the robot
arm trajectory while handling the Z1 truss. |
Each Space Shuttle mission has different purposes. Depending upon the
mission purposes, training subjects and training facilities differ from
one mission to another. To meet the requirements of each mission, many
kinds of training equipment are facilitated in Johnson Space Center
(JSC).
As indicated in the previous training report, astronaut Wakata has many
roles in the STS-92 mission. As the primary robot arm operator, he spends
much of his time on robot arm training, in addition to the integrated
training conducted with other crew members. The other day he participated
in a training simulation assuming on-orbit operation using the Manipulator
Development Facility (MDF).
The MDF training facility simulates a life-size aft flight deck, cargo
bay, and Space Shuttle robot arm and is used primarily for developing
and evaluating robot arm operation procedures and related hardware and
software systems (Fig. 1). The robot arm of the MDF is located on the
left side of the cargo bay, in the same manner as the real Shuttle,
and it can be operated from a control room that simulates the aft deck
of a Space Shuttle (Fig. 2).
The large mockup in the back of Fig.2 is called Unity, a module that
is the base for assembling the International Space Station (ISS). During
the STS-92 mission, astronaut Wakata will be the primary person responsible
for the very important task of connecting the ISS components, the Pressurized
Mating Adapter-3 (PMA-3) and the Z1
truss to the Unity module by using the robot arm. On that day, he
performed robot arm operation training and, together with the robot
arm instructor, confirmed the most suitable robot arm trajectory, location,
and attitude, while watching the clearance between the robot arm and
Unity. Since the MDF is a training facility using life-size mockups,
unlike training simulators utilizing computer graphics, it allows a
trainee to watch and sense the actual size and length of the objects.
Through such training, astronaut Wakata not only maintains and improves
his robot arm operation skill but also plays an important role in determining
and improving the safe and effective robot arm trajectory, location,
and attitude.
|