
|
||||||
 |
| 組立中のノード1とPMA1 |
ノード1は、6箇所の結合ポートを有しており、軌道上で他の与圧モジュールと結合することができるため、宇宙ステーションの拡張のための基幹部となります。
また、各与圧モジュール間を結合するため、通信、電力、キャビンエアなどのケーブルや配管を結合させる重要な部分になります。
ノード1の全長は18フィート(約5.5m)、直径は15フィート(約4.6m)です。
内部には4つのラックを搭載可能ですが、STS-88での打上げ時には、保管ラック1台のみを搭載して打ち上げられます。残りのラックは、後続のシャトルフライトで運ばれて、設置される予定です。
ノード1の各サブシステムの概要を以下に示します。
| (1) | 通信及び追跡システム(C&TS) | |
| (2) | 構造体 | |
| (3) | C&DH(Command and Data Handling) System | |
| (4) | 環境制御、生命維持システム | |
| (5) | 電力系(EPS) | |
| (6) | 熱制御系(TCS) | |
| (7) | 機構系 |
国際宇宙ステーション(ISS)で正式に使われるS-バンド通信システムは、フライト4Aで打ち上げられる予定です。それまでは、ロシアの通信システム(FGBとサービスモジュールのもの)を使用しますが、通信可能範囲の制限が大きいため、これを補完するためにデータ中継衛星(TDRS)を経由して通信を行う初期通信システム(EComm)が使用されます。ECommは、ノード1の両端の外壁に1箇所ずつ設置された箱型のアンテナで、ジョンソン宇宙センター(JSC)のMCC-Hとの通信を行います。STS-88ミッション時には、まず船外活動(EVA)でこのアンテナを設置し、ノード1内部の通信機器への配線を接続する作業が行われます。
低速データモード: コマンド( 6kbps), テレメトリ( 20.48kbps)
高速データモード: コマンド(128kbps), テレメトリ(128kbps)
ラップトップコンピュータを使用したVideo Teleconferencing System (VTS)により、JSCのミッションコントロールセンター(MCC-H)とのTV会議を行うこともできます。
SVSターゲットは、ノード1とPMAの外壁に取り付けられており、結合/切り離し運用時にビデオを使用したドッキングシステムをサポートするための目標(ターゲット)として使われます。打上げ前に、このターゲットの位置を精密に測定してコンピュータ内に記録しておき、クルーがロボットアームを操作して結合/切り離しを行う際に目標物までの位置情報を提供します。
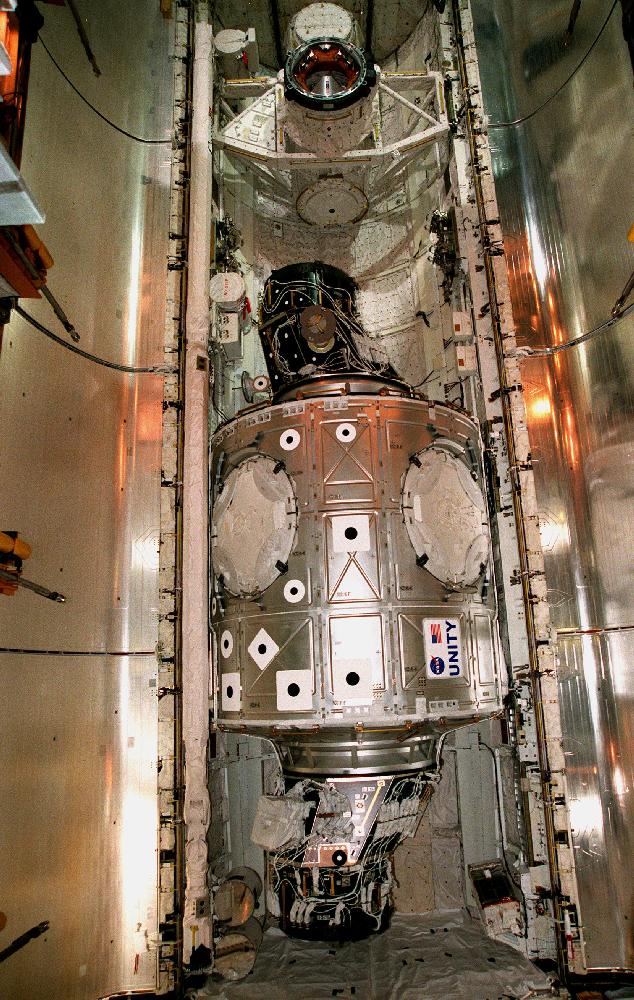 |
| スペースシャトルのペイロードベイ(貨物室)に納められたユニティ |
ノードの1次構造体は、アルミニウム製であり、厚さは約1.3cmあります。巨大な構造物であるため、溶接を行って組み立てられています。与圧モジュールは、軌道上では1気圧(14.7psi(Pound square inches))に与圧されますが、溶接後の耐圧性を確認するため、地上で約1.6気圧(24psi)にまで加圧しての耐圧試験を受けています。耐圧試験の後にはヘリウムを使用(分子量が小さいため漏れやすい気体)したリーク試験、X線検査も行われています。内装、外装に使われる2次構造体にもアルミニウムが使用されています。
ノードの外壁に取り付けられている銀色の部分は、アルミ製のデブリ・シールド(M/OD:Meteoroid/Orbital Debris シールド)です。(一方、PMAのデブリ・シールドは黒色です。)M/ODシールドは、軌道上の1cm以下の隕石体及び、小さな軌道上デブリ(宇宙ゴミ)から与圧部(1次構造体)を保護するものです。
デブリーシールドと1次構造体の間には、多層断熱材(MLIブランケット:Multi Layer Insulation )が取り付けられているため、軌道上の厳しい温度環境の変化から与圧環境を保護することができます。
ノード制御ソフトウエア(NCS)は、フライト5AでU.S.Labが取り付けられ、通信制御系(C&C MDM)が起動するまで、ISSのアメリカ側エレメントの制御を行うものです。NCSは、PMA-1の外壁に取り付けられた2個のMDM(マルチプレクサ/デ・マルチプレクサ)内にインストールされています。クルーは、Early Portable Computer System (EPCS)と呼ぶラップトップコンピュータを使用して、 MDMへのコマンド及びモニタを行います。
ECLSSは、ノード内の圧力、内部温度、湿度、呼吸する空気のモニタリング及び制御を行います。ECLSSは、以下のようなシステムから構成されます。
船内圧力センサー、手動均圧弁、 正圧リリーフバルブ(約1.03気圧(15.2psi)以上で作動)、負圧リリーフバルブ(帰還時に地上圧力よりも約0.007気圧(0.1psi)以上低下した場合にモジュールの破壊を防ぐために作動します)から構成されます。
船内換気ファン、 モジュール間換気アセンブリから構成されます。
有害なガスや浮遊するゴミ等を除去する活性炭/触媒フィルタを4基装備しています。
消火器(PFE)、非常用酸素マスク(PBA)、煙検知機から構成されます。PFE、PBAはシャトルのミッドデッキに搭載して打ち上げ、軌道上で運搬して設置します。
4AフライトでP6セグメント(太陽電池パドル)が運ばれてZ1トラスに設置されるまでは、ノード1はFGBから電力が供給されます。
FGBからは28Vdcの電力が供給され、RACU(ロシア-アメリカ間の変圧器)でノード1が使用する120Vdcに変換されます。このFGBからノード1への電力供給用ケーブルの接続作業は船外活動(EVA)で実施されます。
ノード1には4基のリモート電力分配装置(RPDA:Remote Power Distribution Assemblies)が搭載されています。各RPDAは3基のリモート電力制御モジュール(RPCM:Remote Power Controller Module)を搭載しています。RPDAは電気的に制御可能なサーキット・ブレーカーです。
ノード1の熱制御系は、能動的熱制御系と受動的熱制御系からなります。
受動的熱制御系は、MLI(多層断熱材)ブランケット、ヒートパイプ・ラジエター、壁面ヒーター(ノード1の一次構体の内側には18個の壁面ヒーターがあり、これにより、与圧部の壁が結露するのを防止しています。また、初期入室時の内部温度の低下を抑える役目も果たします。)、温度センサーから構成されています。
ノード1の場合、能動的熱制御系は、内部熱制御系 (ITCS: Internal Thermal Control System)のみです。ITCSは、高温、中温、低温の3つの各冷却水ループにより、熱を発生する各機器に取り付けられたコールド・プレートを介して各装置の冷却を行います。
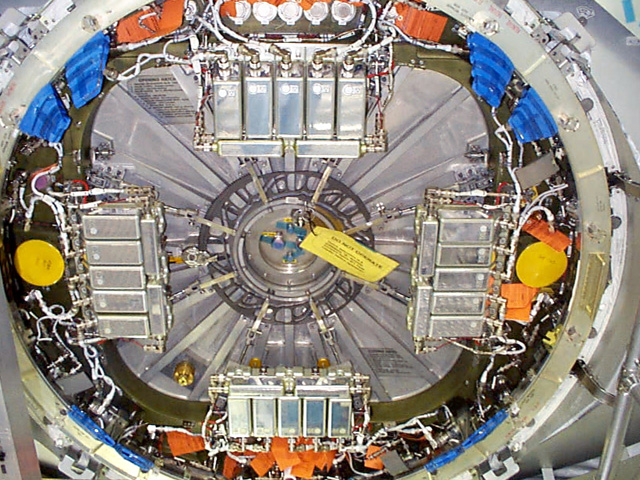 |
| アクティブCBMとCBMハッチ |
ノード1には、5個のアクティブCBM(Common Berthing Mechanism:共通結合機構)(ACBM)と1個のパッシブCBM(PCBM)が装備されています。アクティブ側のCBMには、4個の把持ラッチ、および16個のモータ駆動のボルト、CBM制御装置などを持ち、受動的なPCBMと結合します。
PCBM側にはgask(ガスク)Oシールと呼ばれる3重のOリングが取り付けられており、結合後の気密を保つことができます。


