このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。


「こうのとり」5号機の特徴
- 油井宇宙飛行士が日本人宇宙飛行士として初めて「こうのとり」のキャプチャ(把持)を担当
「こうのとり」5号機のISSへのドッキングに際して、油井宇宙飛行士が、ISSのロボットアーム(SSRMS)を操作して「こうのとり」を把持する担当に決定されました。日本人宇宙飛行士が「こうのとり」の把持を担当するのは初めてとなります。
- 若田宇宙飛行士がリードキャプコムを担当
「こうのとり」5号機のミッションでは、若田宇宙飛行士がNASAのミッション管制センターでリード・キャプコム(CAPCOM)として、地上と軌道上クルーとの交信のとりまとめを担当します。
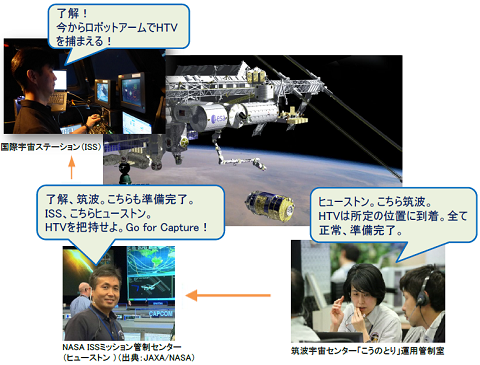
「こうのとり」(HTV)運用時のNASAとの協調運用イメージ(把持運用時)
- 利便性の継続的向上
- 物資搭載方法の効率化により、船内物資の補給能力を段階的に増強しています。
- 搭載可能な容積を、物資輸送用バック(CTB)換算数で初号機(208個)から5号機(242個)までに34個(約15%)増やしました。
- 5号機の搭載能力を増強したことで、水やISSシステム品などの輸送物資増加に応じることが可能となり、ISSの円滑な運用に貢献します。
- ニーズに合わせて、打上げ直前に積みこみ早く出せる速達サービス(レイトアクセス)に対応。速達サービスの対応が可能な荷物の量およびサイズは世界の補給船の中で最大です。
- 品質保持のため生物系の実験試料、宇宙食等
- ISSでの機器故障による急な輸送物資の変更(交換部品の輸送)に対応
通常搭載 打上げ約4か月前に積込み 速達サービス 打上げ10日前~80時間前まで積込み可能 表1 「こうのとり」の速達サービス向上実績
(注)1CTB分を(502mm×425mm×248mm)として容積をCTB個数で換算しています。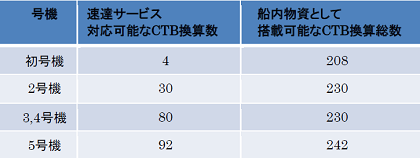
表2 他国の補給船との速達サービス量の比較
(注)1CTB分を(502mm×425mm×248mm)として容積をCTB個数で換算しています。
- 物資搭載方法の効率化により、船内物資の補給能力を段階的に増強しています。
- 宇宙開発利用の発展への貢献
「こうのとり」5号機は小動物飼育装置(MHU)、静電浮遊炉(ELF)、高エネルギー電子・ガンマ線実験装置(CALET)など、「きぼう」の新しいニーズに対応するため、新たな実験装置を運びます。
また、多目的空間実験ラック(MSPR-2)、超小型衛星放出、簡易曝露実験装置(ExHAM)による実験の機会など、多様な利用機会を提供することにより宇宙開発利用の発展に貢献します。
- 宇宙環境観測装置(KASPER)を設置
「こうのとり」は、4号機以降、ISSへの物資輸送だけなく、将来の我が国の宇宙機開発に役立つ技術の蓄積にも活用されています。5号機では宇宙環境観測装置(KOUNOTORI Advanced SPace Environment Research equipment: KASPER)が搭載されます。
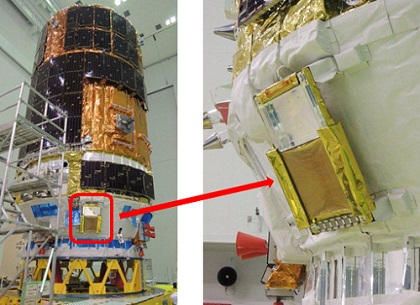
KASPERの設置場所
「こうのとり」がISSに結合する際に「こうのとり」の電位がどのように変化するか、また、「こうのとり」が係留中にISSの電位に与える影響を明らかにすることは、ISSの安定運用の観点からは非常に重要です。このため、4号機では「こうのとり」に表面電位センサ(ATOTIE-mini)を搭載し、データの収集を行いました。
5号機では、さらに機能を付加した発展型のセンサである宇宙環境観測装置KASPER (KOUNOTORI Advanced SPace Environment Research equipment)を搭載します。KASPERには、4号機で搭載した表面電位計に加え、新たに帯電電位評価用のプラズマ電流計測装置、デブリ衝突を検出する2種類のセンサが搭載されています。
詳細は以下のリンクをご覧ください。
- 参考:「こうのとり」5号機に搭載される宇宙環境観測装置「KASPER」について(JAXA研究開発部門ウェブサイト)
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |