このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で


「こうのとり」2号機がSSRMSに把持されました
最終更新日:2011年1月27日
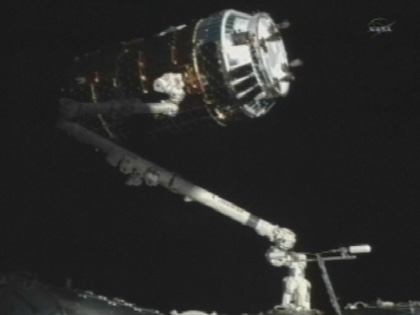
SSRMSに把持された「こうのとり」2号機(出典:JAXA/NASA)
1月27日午後8時41分、国際宇宙ステーション(ISS)のクルーが操作するISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)により、宇宙ステーション補給機「こうのとり」2号機(HTV2)が把持されました。
「ハーモニー」(第2結合部)への結合作業は、午後11時45分から開始される予定です。
※断りのない限り、日時は日本時間です。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |