このページは、過去に公開された情報のアーカイブページです。
<免責事項> リンク切れや古い情報が含まれている可能性があります。また、現在のWebブラウザーでは⼀部が機能しない可能性があります。
最新情報については、https://humans-in-space.jaxa.jp/ のページをご覧ください。
ISSサイト内で
JAXA全体で


HTV技術実証機、ISSのロボットアームによる把持成功
最終更新日:2009年9月18日
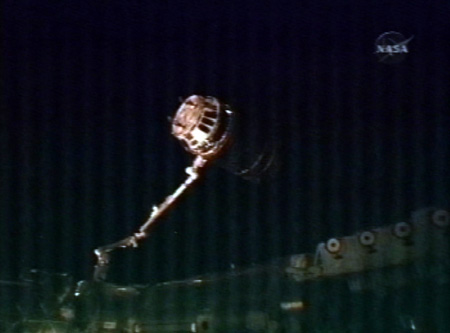
HTV技術実証機は、9月18日午前4時51分、ISSクルーが操作するISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)での把持が完了しました。同日午前4時47分に、SSRMSのエンドエフェクタ(把持手)がHTV技術実証機のグラプルフィクスチャを把持し、その後、エンドエフェクタ内にあるワイヤでグラプルフィクスチャを引き込み、午前4時51分に完全に固定しました。
※断りのない限り、日時は日本時間です。
| Copyright 2007 Japan Aerospace Exploration Agency | SNS運用方針 | サイトポリシー・利用規約 |