


今月は前回に引き続き、国際宇宙ステーション(ISS)のロボットアームについてご紹介したいと思います。ロボットアームがどんなものなのかについてはどうぞ前回のコラムをご覧下さい。今月は宇宙飛行士がどのような訓練を受けているのかについて、書きたいと思います。
まず始めに、アームの操作方法について簡単に触れますと、2つのコントローラーを使います。左手で1つ、右手でもう1つのコントローラーを握って、アームを操作します。
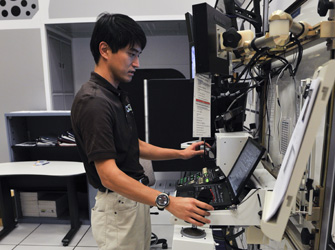
写真は、ロボットアームのシミュレーターを操作しているところですが、左手で握っているものが、アームを3次元空間で前後左右上下に移動させるコントローラーになります(実際には宇宙にはどちらが上でどちらが下といった概念はないので、操作者がまず始めに座標系というものを定義してやるのですが、少し話が複雑になってしまうので今回は割愛します)。
もう1つのコントローラーは、よく飛行機のシミュレーターなどで見たことのある方も多いと思いますが、アームの姿勢を操作するコントローラーになります。これを操作することによって、アームの向いている方向を変えることができます。
この2つのコントローラーを同時に操作して、3次元空間でアームを任意の位置に移動させ、任意の方向に向けることが可能になります。左右の手で、それぞれ違ったものをコントロールするわけですから、ここが宇宙飛行士の腕の見せ所でもあります。
もちろん、いきなり複雑な操作ができる人はいないので、そこで訓練が非常に重要になってくるわけです。自動車で言えば、車を公道で走らせる前に教習所で練習をするようなものです。まずは発進と停止、それから直進の練習、そしてカーブ・・・
アームの操作練習もこれによく似ています。スムーズなコントローラーさばきで、アームをゆっくり動かす練習、停止させる練習、単純な直進操作、それに慣れてきたら斜めの移動、といった具合です。
アームの操作方法を身につけると、次に待っているのは実践に即した練習です。意外に思われるかも知れませんが、実際にISSで宇宙飛行士がアームを操作する機会というのは、実はそれほど多くはありません。大抵の状況下では、地上からの遠隔操作でアームを操作することが可能だからです。しかし、どうしても地上からの遠隔操作では限界があるケースが2つあります。1つは船外活動の支援、もう1つはISSに接近してきた宇宙船のキャプチャ(掴まえること)です。
これら2つのケースでは、迅速かつタイムリーな操作が求められるので、地上からの遠隔操作ではどうしても限界があるわけです。ですから、宇宙飛行士はこれら2つのケースについては、厳しい訓練を受けます。状況によっては、アームの操作だけではなく、システムの不具合にも宇宙飛行士自ら対処しなければなりません。
実際のそれらの訓練の雰囲気を味わって頂く為に、今回は日本のISS補給機「こうのとり」をロボットアームでキャプチャする訓練の模様を、実況放送風にお伝えしたいと思います。
以下、状況を解説するナレーター、ロボットアーム操作者(私)、サポート役の宇宙飛行士(教官)でお送りいたします。
・・・・・
私 「これより『こうのとり』のキャプチャを開始します。動作開始」
ナレーター 「さあ、大西宇宙飛行士、慎重にアームを動かし始めました。急激な動作は、アーム自体の振動につながる恐れがあるので、避けなければなりませんよ」
教官 「了解。動作確認。現在、『こうのとり』まで約5m。徐々に遠ざかりつつあります」
私 「了解。接近率を少し上げます」
ナレーター 「ISSから遠ざかろうとする『こうのとり』と、まずは相対速度を合わせます。その間にも、上下左右のずれに対してもアームを追随させる必要がありますからね、これは忙しいですよ!」
教官 「良い接近率になってきた。距離、約4.5mまで接近」
私 「もう少し接近率上げていきます」
ナレーター 「接近率が順調に上がってきました。依然として、上下左右は少しずれたままですが、『こうのとり』は絶えず動いていますからね。距離のあるうちはこれくらいで十分との思惑でしょうか」
教官 「接近率良好。距離2.5mを切りました」
私 「了解。『こうのとり』へFree Driftの指示を送信」
教官 「了解。Free Drift送信。『こうのとり』Free Driftモードへの切り替わりを確認」
ナレーター 「出ました、Free Driftモードへ移行完了です。これ以後、『こうのとり』は姿勢制御のためにスラスタを噴射しません。その間に、速やかにキャプチャしてやる必要があります」
私 「移行完了了解。接近率このまま。右方向へのずれ、現在修正中です」
教官 「了解。・・・・距離1.5m・・・・1m」
ナレーター 「このあたりは非常に小刻みな修正が求められます。『こうのとり』は慣性だけで宇宙空間に漂っている状態ですから、うまくその流れに合わせてやらなければいけません」
教官 「・・・・距離60cm・・・・30cm」
私 「ずれは全て許容範囲内。このままキャプチャを継続します」
教官 「許容範囲内について、こちらも了解。キャプチャ継続に同意します」
ナレーター 「ここはアームと『こうのとり』の相対的なずれが一定の範囲内に収まっていることを確認する重要なポイントですからね!2人で相互に確認しあいます。さあ、ここまでくればもう一息ですよ」
教官 「『こうのとり』キャプチャ可能範囲内に入りました」
私 「アームのキャプチャ動作を開始します!」
教官 「了解!」
私 「・・・・・・!?」
ナレーター 「おおーーーっと!出ました。教官がシミュレーターに不具合を入力しておいたようです。アームのキャプチャ動作が開始されません。さあ、どうする??」
私 「不具合の発生を確認。手順に従い、不具合早見表を参照します。ケース2の、キャプチャ動作を完了できないケースに該当すると判断」
教官 「同意します」
私 「早見表の指示に従い、バックアップ系統への切り替えを実施します」
教官 「了解」
ナレーター 「大西宇宙飛行士、ここは慌てずしっかりと手順通りに対応していきます。このあたりは前職のパイロットの経験が生きていると言えるでしょう。さあ、バックアップ系統への切り替えが終わった模様です」
私 「キャプチャ動作を再度開始」
教官 「動作開始確認。・・・ピンの引き込み確認。・・・良好な張力。『こうのとり』のキャプチャを確認!」
ナレーター 「バックアップ系統で無事、キャプチャを完了できたようです!大西宇宙飛行士、ほっと胸を撫で下ろしています。が、しかしこのあと、教官からのダメだし(デブリーフィング)が彼を待っています。今回、結果的にはキャプチャは成功しましたが、そこに至るまでの操作はどうだったか、判断は妥当だったかなどなど、しっかりと反省すべき点を洗い出して、次に生かしていってもらいたいですね。さあ、それではそろそろお別れの時間が近づいてきたようです。宇宙飛行士の訓練の実況放送いかがでしたでしょうか?また別の機会にお目にかかりましょう・・・」
※写真の出典はJAXA/CSA