宇宙飛行士候補者は、11月後半からカナダのケベック州にあるカナダ宇宙庁(CSA)ジョン H.チャップマン宇宙センターで、ロボットアームについて訓練を受けました。
CSAはスペースシャトルや国際宇宙ステーション(ISS)のロボットアームを開発するなど宇宙ロボティクス分野で特化した技術を持ち今回3人はISSに搭載されるISSのロボットアームや「きぼう」日本実験棟のロボットアームなどの宇宙用ロボットアームを操作するための基盤となる知識や技能を修得するための訓練を受けました。
この訓練コースは新しく、受けるのは今回の3人が初めてです。候補者は、ロボットアームの歴史や種類などの概論、力学、制御の仕組みや一般的なロボットアームの操作方法、ロボットアーム操作に不可欠なカメラの操作方法などについて講義や、以下の様々な設備を用いて実習を行いました。
訓練終了後には、CSA長官により、訓練修了証が授与されました。
 | 訓練設備 |
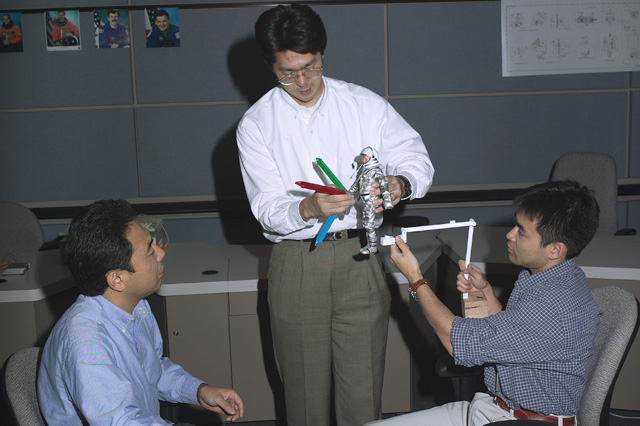
| | BORIS(Basic Operational Robotics
Instructional System) |  |
| | コンピュータグラフィックを用いたロボットアーム操作訓練用のシミュレータです。ハンドコントローラを用いたアーム操作と、カメラ操作などを行うことができます。
候補者は、このシミュレータ内の「スペースポート」と呼ばれる架空の世界の中でのロボットアーム操作を通じて訓練を行いました。
|
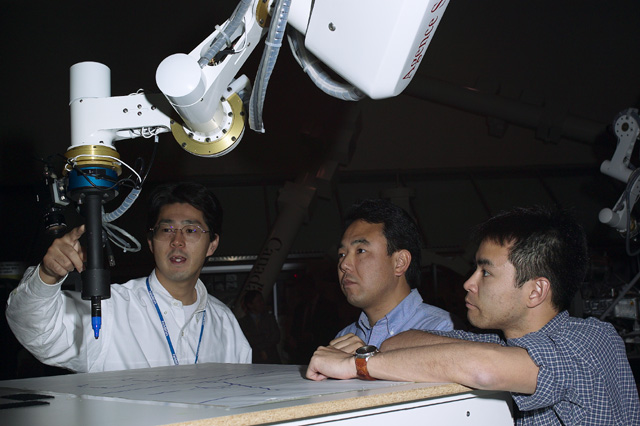
| | CART(CSA
Automated Robotics Testbed) |  |
| | ロボットアームの技術研究などに使われている全長約2.5mの双腕型ロボットです。
候補者は、コンピュータグラフィックスのシミュレータだけでなく、この本物のロボットアームも使うことで操作技術を一層深める事ができました。このロボットでは、アーム先端にペンを取り付けて文字を描くという操作も体験しました。
|
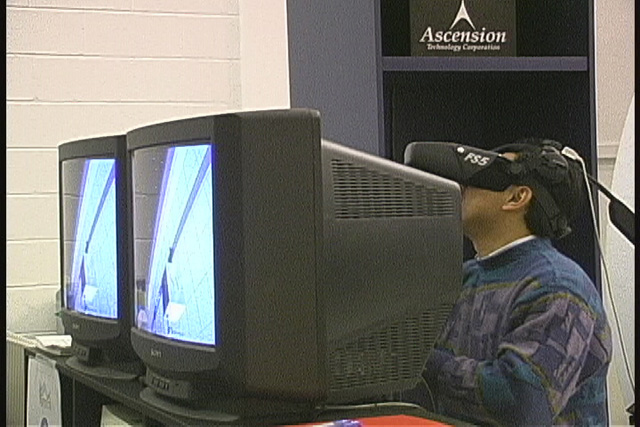
| | VOTE(Virtual
Reality Operation Training Environment) |  |
| | ヴァーチャルリアリティを利用した訓練設備です。ヘッドマウントディスプレイを装着して部屋の中を歩き回ることでスペースポート内を歩いている仮想現実を体験できます。実際には宇宙空間にあるため近づくことのできないロボットアームですが、この設備を使う事でアームを目の前で見ながら動作の特徴を観察できました。 |
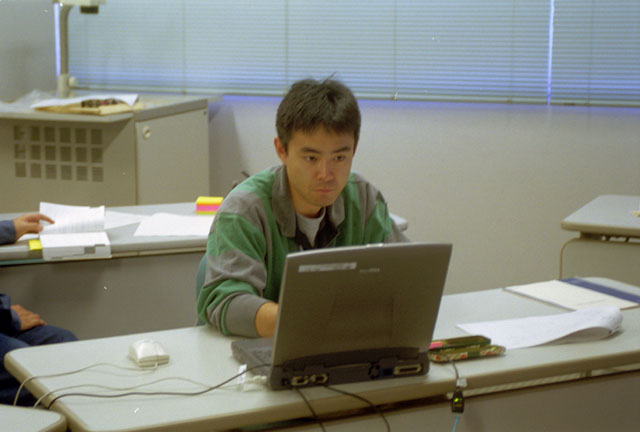
 | UNIX操作実習 |
宇宙飛行士候補者は、計算機概論としてOS(基本ソフト)のひとつであるUNIX操作実習を筑波宇宙センターで行いました。
UNIXは歴史が古く信頼性の高いOSで、ワークステーションや一部の高性能のパソコンに使われています。ISS全体では、約8割のOSにUNIXが使われており、通常の運用では直接UNIXを操作することはありませんが、システムに異常が生じたときなどの緊急時に操作する可能性があることと、基本的なプログラムの知識を学ぶためにUNIX操作実習を行いました。
候補者は、端末を操作してUNIXの基本操作やコンピュータのシステム管理の方法などについて学びました。
 |  |
|
古川候補者 | 星出候補者 | 角野候補者 |
なお、皆様には大変ご迷惑をおかけしますが、12月の訓練レポートはお休みさせていただきます。1月分をお楽しみに。